APP下载
APP下载 登录
登录







0引 言
动调式陀螺油气井测斜仪(动调陀螺测斜仪)是一种可在油气勘探中用于测量钻头走向方位的仪器,且不受地磁干扰,它可在油气井中按实际油层方向重新开窗,使废旧井或老井得到二次开发,不但节约了开支,而且也大大节省了人力物力,因而日益受到业界的青睐,国内也急需此类井下仪器。本论文着眼于基于CPLD的陀螺测斜仪信号采集电路设计。这主要缘于将各种模拟信号转化为数字信号再进行相应的处理,不仅可以提高系统的整体性能,还可以充分利用现代信号分析的各种处理算法。特别是,为提高测量精度,在提高陀螺仪和加速度计制造工艺的同时,作为捷联惯性测量组合的核心部分--数据采集电路的设计,则显得尤其重要。
1仪器的构成及采集系统方案选择
1.1仪器的构成
动调陀螺测斜仪主要由井下仪器和井上(地面)仪器两部分组成,井上、井下仪器通过单芯测井电缆相连,如图1所示。井下仪器是该测斜仪的数据采集与数据传输等部分,按其功能和作用主要由捷联惯性系统、反馈系统、信号采集电路、微控制系统等几部分构成;井上(地面)仪器是以便携式微机为核心的主计算机系统,以完成数据分析与处理等工作。
xa0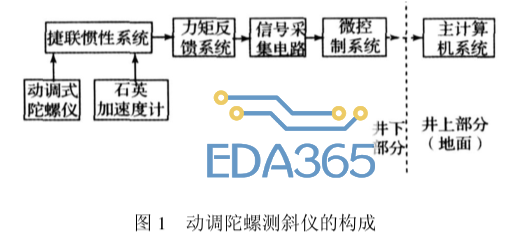
1.2数据采集系统方案选择
动调陀螺测斜仪的数据采集系统,可以分为三类:(1)基于单片机(MCU)的数据采集系统。其成本低廉,实现容易,可以实现微秒、毫秒级的采集速度,但是它的抗干扰能力较差。以51系列的单片机为例,在设计完成单片机系统且在试验室调试成功后,在工程现场由于不可预测的干扰因素(如油气井下高温、高压等),常常会出现"死机"、"程序跑飞"等实际应用中绝对不允许存在的现象。(2)基于DSP数字信号处理器的数据采集系统。其特点是:精度高、灵活性好、系统稳定,处理速度快、可以分时复用、抗干扰能力相对于单片机(MCU) 有很大的提高,但价格也较高。采用DSP的数据采集系统,虽能通过软件控制数据采集的A/D转换,但必将频繁中断系统的运行,从而减弱系统的数据运算能力,数据采集的速度也将会受到限制。(3)基于CPLD的数据采集系统。CPLD芯片价格昂贵,但能实现高速采集,可以处理纳秒级的采集速度,且易于升级扩展。尤为重要的是,一旦CPLD完成程序的烧写,其内部就相当于硬件电路的连接,抗干扰能力可以得到显著的提高;同时,使其能在油气井下高温、高压等的恶劣环境下,维持稳定工作。有鉴于此,本文选择采用基于CPLD的数据采集系统进行了研究与开发。
2采集系统的硬件设计
动调陀螺测斜仪的数据采集信号,包括动调陀螺仪测得的地球自转角速度水平分量ωx、地球自转角速度的垂直分量ωy、加速度计测得的重力加速度的水平分量ax、重力加速度的垂直分量ay以及井下的实际工作温度T。因此,它是一个多路信号的采集系统。为使需要采集的所有信号与A/D转换芯片的量程相匹配,须设计一个信号前端预处理电路。针对5路的信号采集,系统采用8通道HI-548模拟多路复用器对信号进行选择;AD7899SR-1实现信号的A/D转换;CPLD完成A/D转换的控制功能。其接口电路,如图2所示。
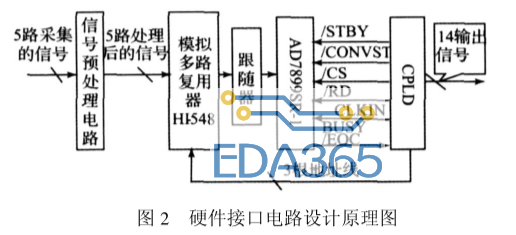
图中,CPLD芯片采用的是ALTERA公司的EPM1270。A/D转换芯片采用的是AD7899SR-1,它是美国AD公司生产的高速、低功耗、逐次逼近型单电源14位A/D转换器,具有如下特点:
(1)可选择的输入范围:±10 V、±5 V、±2.5 V、0~2.5 V以及0~5 V;
(2)允许与3 V处理器兼容的高速并行接口;
(3)低功耗,正常工作时功耗为80 mW,在省电的工作模式下,功耗仅为20μW;
(4)模拟信号输入端具有过压保护。
AD7899SR-1控制字的功能有:
(1)/STBY:逻辑输入,低电平为低功耗模式(备用模式),高电平为正常工作模式;
(2)/CS:逻辑输入,片选信号,低电平有效;
(3)/RD:逻辑输入,低电平有效,与/CS配合,读入AD转换的结果;
(4)/CONVST:逻辑输入,一个上升沿信号启动AD转换;
(5)CLKIN:时钟输入,若CLKIN为高电平时,/CONVST输入一个上升沿,一个外界提供的时钟将作为A/D转换的转换时钟;若CLKIN在低电平时,/CONVST输入-个上升沿,内部激光平衡的振荡器将提供A/D转换的转换时钟。如果要完成A/D转换,上述两种形式的时钟输入都需要16个时钟周期;
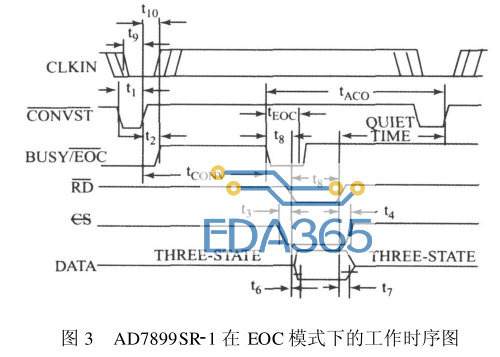
(6)BUSY/EOC:逻辑输出,判断A/D转换是否完成,它有两种工作模式,BUSY模式和EOC模式。
在EOC模式下,A/D转换的工作时序图,如图3所示。EOC模式下,/CONVST通常是高电平状态,/CONVST的上升沿将启动AD转换,转换完成后,BUSY/EOC将产生一个负脉冲,/CS和/RD配合使用,CPLD就能够读取转换结果。本文中的/STBY,则一直接高电平,即AD7899SR-1一直工作在正常模式下;而/CS一直接低电平,AD7899SR-1则一直处于选中状态。
3采集系统的软件设计
3.1 A/D转换的状态转换图和状态转换表
A/D转换控制软件的设计平台是QuartusⅡ5.0,编程语言是硬件描述语言VHDL。根据AD7899SR-1的控制字以及CPLD的读写需要,可将整个A/D转换过程分为7个状态:S0,S1,S2,S3,S4,S5,S6,各个状态所要完成的功能,如表1所示。
3.2 A/D转换的控制程序
根据状态转换表和状态转换图,动调陀螺测斜仪的信号采集系统整个软件工作流程,如图4所示。

4结果与讨论
在设计完成动调陀螺测斜仪信号采集系统后,对基于CPLD的数据采集系统进行硬、软件的调试,其结果如图5所示。从AD7899的仿真波形可见,数据采集系统的设计满足了动调陀螺测斜仪信号采集的要求。图6为基于CPLD的动调陀螺测斜仪数据采集系统界面图。
5结 论
(1)选择采用CPLD取代MCU,对动调陀螺测斜仪的数据采集系统进行控制,可以提高数据采集系统的抗干扰能力。
(2)CPLD具有丰富的可供二次开发的资源,这为动调陀螺测斜仪灵活、快捷的升级换代提供了基础或保证。








 热门文章
热门文章