APP下载
APP下载 登录
登录







移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行操作和控制。随着机器人的智能化水平越来越高,控制器要有方便、灵活的操作方式,以及多种形式的控制方式和高度可靠性,还要有很高的实时性。
为了保证系统的实时性,简化控制系统软件的设计,有必要在控制系统引入嵌入式操作系统。本设计将嵌入式技术与机器人技术相结合,利用ARM作为硬件平台并移人μC/OS-Ⅱ嵌入式实时操作系统,开发了具有多线程、多任务管理的控制终端。嵌入式主控制器ARM是整个机器人控制系统的核心,主要完成环境感知、组织管理、总体任务分配。嵌入式主控器作为机器人的运算层,一方面作为控制上位机,可以通过串口与下位机伺服控制系统通信,从而完成机器人的运动控制;另一方面还提供了与遥控操作端或用户端的无线通信接口。本文设计的机器人控制系统可应用于日常生活、足球机器人以及其他科学探索领域。
1 系统组织架构与硬件设计
设计时考虑到机器人在体积、质量等方面的限制,以及要满足功耗低,实时性高,性能优越的特点,选择合适的软硬件结构及有效的控制模式是整个设计过程的关键。
1.1 系统总体架构
整个机器人控制系统由嵌入式主控制器、伺服控制模块、无线通信模块和传感检测模块组成。控制系统的总体架构如图1所示。
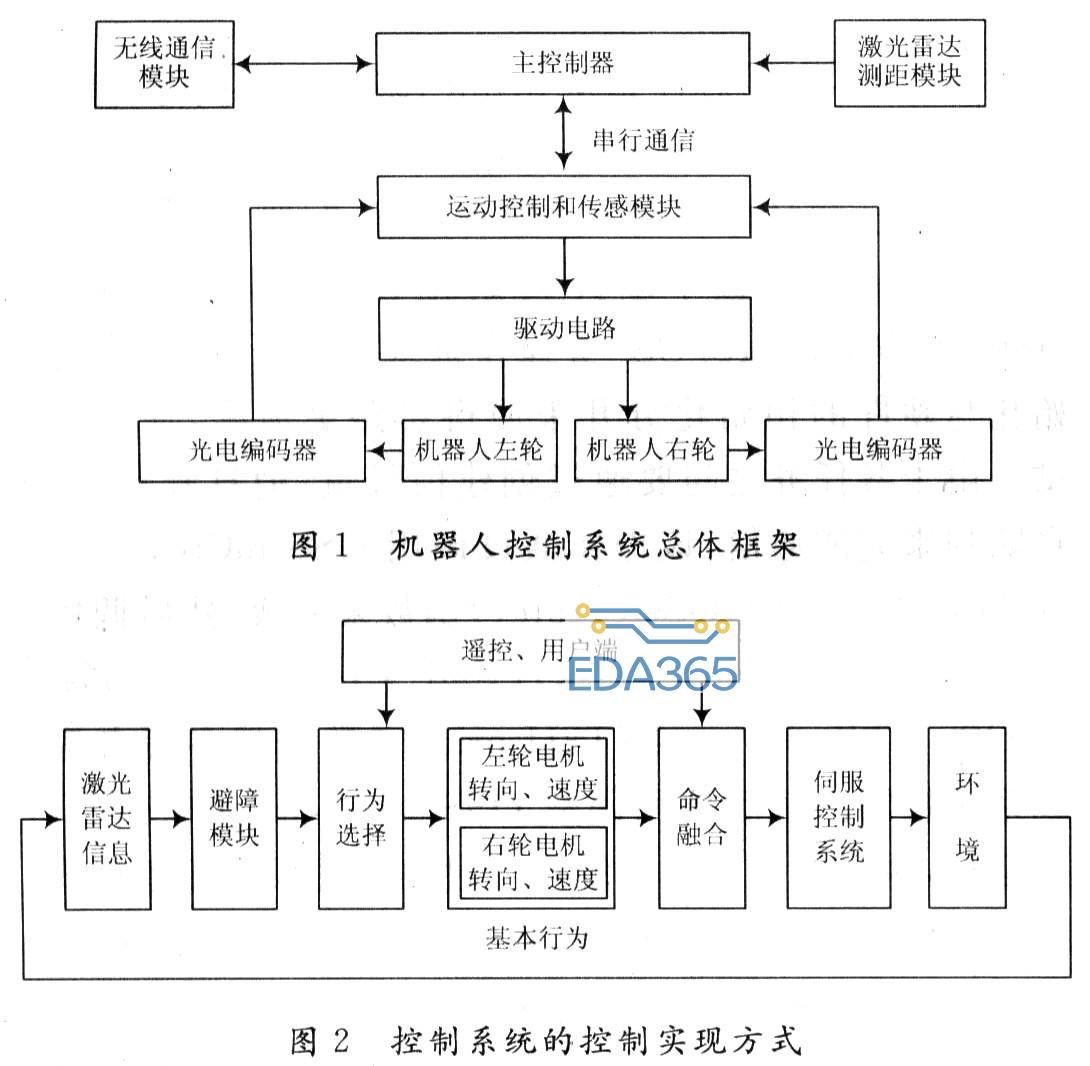
按功能划分,该控制系统分为上下两层。由实现任务管理、运动轨迹生成、定位的上层控制系统,以及完成机器人伺服控制、传感器信息采集的下层控制系统组成。上层控制系统是整个控制系统的核心控制层,它有两种控制实现方式:一种是独立运行模式,另一种是遥控或远程实时控制模式。独立运行模式有自己的运行参数,即上层控制系统根据激光雷达的信息传递到环境建模模块,产生环境地图并产生避障算法所需信息,控制器根据避障模块信息产生机器人本体速度和方向信息,传递到运动控制器。在运动控制底层程序定义了一系列程序,运动控制器通过解释上层控制系统传递过来的信息并执行相应程序,从而达到机器人控制的目的,实现实时避障。遥控器或远程实时控制模式是通过无线通信单元接收用户端或遥控端发出的命令,实现对机器人的实时控制。系统的控制实现方式如图2所示。
1.2 主控制模块
主控制模块采用SAMSUNG公司16/32位RISC处理器S3C4480作为控制器。S3C4480功耗低,有多种电源供电方式,有多种外部存储器访问,新的总线体系结构(SAMBA),速度可达132 MHz。主控模块使用Hynix公司的HY57V281620(SDRAM)以及SAM-SUNG公司的Nand-Flash芯片K9F2808U作为存储器。为了增大数据吞吐能力,选取了2片SDRAM构成32位地址宽度。S3C4480使用ARM7TDMI核,它满足μC/OS-Ⅱ正常运行的所有条件,设计时S3C4480移入μC/OS-Ⅱ操作系统,将加快处理器的应用和开发,而且还能提高系统的实时性。通过将系统的功能划分成按不同优先级调度的任务,实现对机器人的多任务控制,主控制模块中的路径规划任务采用栅格法。
1.3 激光雷达测距模块
激光雷达是一种工作在从红外线到紫外光谱段的雷达系统,相对于超声波、红外、摄像头等其他传感测距方法,激光雷达具有探测距离远,测量精度高,价格相对适中等优点。在本设计中使用德国施克公司的LMS291激光测量系统,基于飞行时间测量原理,180°扫描角度,可以设置三个保护区域,具有滤波功能,以消除障碍检测过程中激光雷达的测距噪声干扰。
LMS291激光雷达通过旋转镜面向各个方向发射脉冲激光,并由LMS291接收器接收反射光线。该激光雷达响应时间可固定为13 ms,发射角为几mrad的激光脉冲,通过测量发射脉冲与反射脉冲之间的时间延迟,并乘以光速,就可以测得障碍物的距离。时间测量通过图3所示的脉冲填充法求出。
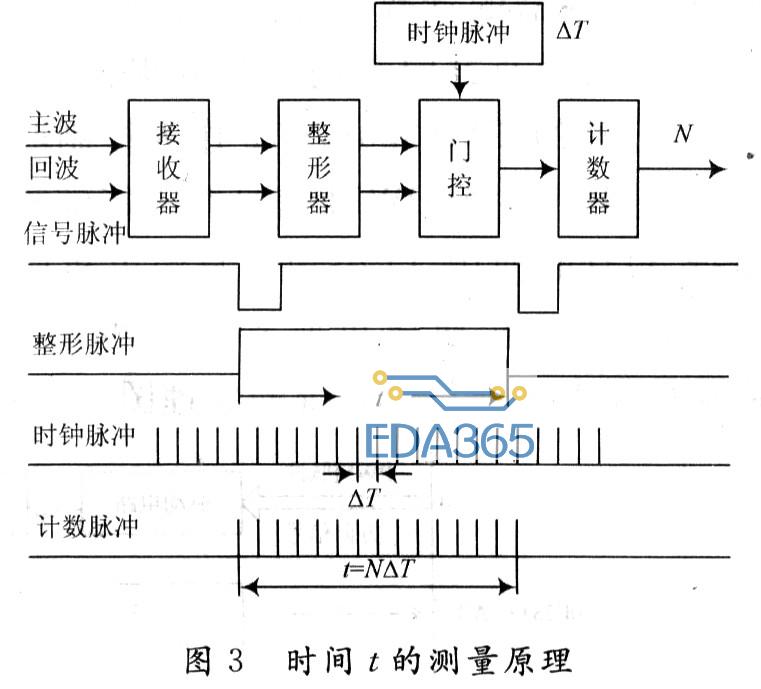
如果计数值为N,则t=N△T=N/f,从而可得L=ct/2=cN/(2f),其中,f为时钟脉冲。
LMS291激光测量系统提供RS 232数据接口,本设计主控制器采用的是S3C44B0,由于它的LVTTL电路所定义的高、低电平信号为正逻辑,而RS 232标准采用负逻辑方式,两者间通信要进行电平转换,在设计时系统采用RS 232电平转换芯片MAX232ACPE实现串口的通信。








 热门文章
热门文章