×


0 引言
雷达发射机的控制保护电路中的逻辑控制,大多采用+15V的CMOS逻辑,各种故障的比较采用的是模拟比较。这不仅使元器件分散,不易集成(因为没有+15V电压的可编程器件),不能编程,修改困难。最主要的问题是采样电压都是模拟电压,不能与单片机和计算机连,不易做液晶显示。而现在进口的发射机基本上都带液晶显示,界面良好,想看某个电压就可以显示某个电压,并且已经把这一部分电路模块化了。同时,一些大型的数控机床及环境实验箱现在也都是用数字信号控制和显示的,所以,模拟信号数字化是发射机控制保护电路的发展方向。
现在采用先进的CPLD技术,将控制开关机顺序的组合逻辑用一片CPLD来实现;而故障比较部分用A/D变换器把采样的模拟信号变成数字信号,再用另一片CPLD进行数字比较,使各路的故障比较由原来的并行工作,改成串行工作。这两部分完成了控制保护系统的控制和保护两大功能,而且大大减少了元器件数量。
本文就如何用CPLD实现预热延时、风冷延时,加电的顺序控制,各种故障的指示,消除按键的抖动等功能;如何用CPLD实现串行采样、数字比较;如何实现各种取样的模拟电压与数字信号的衔接;如何解决电平变成+5V后,可能会带来控制保护系统的误报故障;以及如何在控制保护电路地跟发射机地连在一起时,滤掉纹波保证A/D的精度等方面,进行了简述。
本系统的技术特点如下:
——使用了先进的CPLD技术,使编程和修改更加容易,可移植性增强;
——元器件数量减少,控制简单方便,提高了系统的可靠性;
——有各种故障指示,当出现故障时可以准确定位。
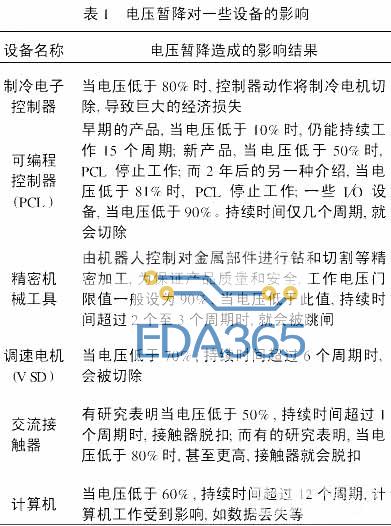
1 对发射机控制保护系统的要求
发射机由于其行波管非常昂贵,而且行波管的阴极电压和收集极电压都是高压,输出功率很大,所以,发射机的控制保护系统尤为重要。要求在出现任何一种故障时,控制保护系统都能发现故障,并且切断供给行波管的高压。控制保护系统分为控制和保护二部分,各部分具体要求如下。
1.1 控制部分
1.1.1 开关机顺序
开机时灯丝要有足够的预热时间,一般预热时间需要3~5min。只有在灯丝电压达到一定的幅度,预热达到要求时间,以及没有任何故障的情况下,才允许加高压。待高压加到一定的幅度才允许加触发脉冲。关机时,应先切断高压,后切断低压,而且低压切断后,要求风冷延时断电,使行波管的风机继续工作1~2min,再切断电源。所以,控制保护电路中要具有预热延时和风冷延时功能。
1.1.2 故障处理
在高压加上后,如果出现任何故障,应该立即切断高压,以免造成行波管或高压电源损坏。
1.1.3 显示
发射机在正常工作时应有显示,在故障发生时也应该有显示。
在正常工作时,加上低压,“预热”灯亮。预热时间达到后,如果没有任何故障,“待机”灯亮,这时按下“高压通”键,“高压通”灯亮。
发生故障时,无论是何种故障,该故障对应的显示灯都应亮。共有11种故障灯,分别是阴极过压、收集极过压、灯丝欠压、螺旋线过流、总供电过流、重频故障、反射功率故障、行波管过热、二组合过热、光纤故障、门开关故障。
1.2 保护部分
发射机具有过压保护、过流保护、温度保护、占空比保护、驻波保护、门开关保护等功能。
1.2.1 过压保护
对于行波管来说,它的阴极和收集极电压都很高,现在大多采用开关电源,电压很快就升到行波管要求的阴极和收集极电压。如果反馈环路一旦失控,将使行波管因为过压而烧毁。所以,必须检测行波管阴极和收集极电压,一旦出现过压立刻将高压切断。主要是切断开关电源的脉宽调制器的输出脉冲,使主功率器件没有驱动脉冲,达到保护的目的。
1.2.2 过流保护
包括螺旋线过流保护和总供电的过流保护。前者主要是保护行波管,防止行波管的螺旋线因电流过大而烧毁。后者是保护高压电源和行波管,防止高压电源短路或电流过大造成对行波管和高压电源的损害。
1.2.3 温度保护
发射机由于输出功率大,使得其本身的功耗较大,另外,一些功率器件也比较热,虽然有风冷系统,但为了安全而在关键件上另加温度保护电路,一旦超过所设定的温度门限,立即切断高压,使该器件不致因温度过高而损坏。
1.2.4 占空比保护
脉冲行波管的占空比是行波管的主要指标,如果超过允许的最大占空比会损害行波管,所以,对输入脉冲的占空比要有限制,一旦超过,立即切断高压,使行波管不工作。 [page]
1.2.5 驻波保护
行波管是发射功率器件,如果反射的功率过大会损坏行波管,所以设置驻波保护。
1.2.6 门开关保护
由于发射机内有高压,为保护人身安全,不允许在发射机开盖的状态下加高压。
2 控制保护系统功能的实现
2.1 组合控制逻辑
由一片CPLD(图1中为CPLD1)完成如下功能:——风冷延时和预热延时;
——接受键盘上的“低压通/断”、“高压通”、“高压断”、“复位”、“天线/负载转换”等指令,产生相应的逻辑;
——控制加高压的顺序,必须先通低压,加灯丝电压、待灯丝“预热”状态结束,并无任何故障时,才允许加高压;高压升到一定的幅度才允许加触发脉冲;当出现任何故障的时候,都必须首先切断高压;完成正常状态与故障状态的显示和编码,即把各种状态指示出来,如按“低压通”键时,“低压通”灯应亮;预热状态时“预热”灯亮;风冷状态下“风冷”灯应亮;预热状态结束时,“高压断”灯应亮;按“高压通”键时,“高压通”灯应亮;当发生任何故障时,均应切断高压,“保护”灯应亮,同时对应该故障的灯应亮;当故障排除后,按“复位”键,系统应能回到高压断状态;另外,还要把多种故障编成码,送中心机显示。
2.2 时序控制逻辑
由另一片CPLD(图1中为CPLD2)实现,这一片CPLD的功能是分时地采样5路模拟信号,将其转换成数字信号,送入相应的锁存器里,然后与各自的数字基准比较,超过基准的判为“高”,并将比较的结果送入上一片CPLD作为故障指示。按照上述要求,这一片CPLD应完成如下功能:
——给多路A/D产生地址选择信号,并在每一路地址有效期间完成;另外,产生数据采样信号给A/D变换器,使A/D开始转换,转换完后,在70ns内将转换的数据送入相应的锁存器;
——进行多路数字比较,产生故障信号,并将故障信号送入控制组合逻辑的CPLD,切断高压。
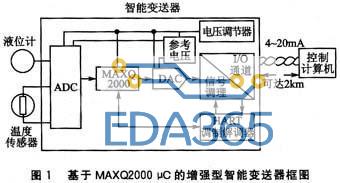
3 控制保护系统方框图
控制保护系统的方框图如图1所示。CPLD1主要完成对发射机的开关顺序控制。CPLD2主要给A/D变换产生时序,以及完成数字比较,产生各种门限保护。差分运放主要是用来去除来自发射机内的取样信号的共模干扰。光接受器/锁相环主要是采样悬浮于地的收集极电压。阴极脉宽调制器主要产生驱动阴极高压电源的脉宽调制信号。收集极脉宽调制器主要产生驱动收集极高压电源的脉宽调制信号。
图1 小型化发射机数字控制保护电路方框图
[page]
4 实现控制保护系统功能时出现问题的分析和解决办法
4.1 电平反串
由于发射机在起始通电状态下只有热电源在工作,其余部分都不上电,当按下“低压通”键时,发射机其余部分才上电。所以,发射机的控制保护电路必须要把“低压通”键和其余键的逻辑分开,即“低压通”键的逻辑不能与其余键的逻辑一起置于CPLD中,而必须拿出来单独处理。它的作用就是只对控制“低压通”键的芯片上电。这就产生了由于上电分先后而带来的电平反串问题,即在只有加热电源时,就有1.8V左右的电平串入单独给CPLD供电的+5V电源中,而这时给CPLD供电的+5V电源并未加,由于CPLD是3.3V/5V都可工作的,所以CPLD这时已经开始工作,产生许多错误逻辑,使许多故障灯都亮了,这是不允许的。测试发现这个反串电平是由于54HC245这个芯片带来的,而且后来发现,驱动能力越强的芯片,反串电平就越严重。
解决的办法是将送显示的驱动芯片换掉,都改成光电耦合器,这样就解决了反串电平的问题,而且有利于将控制保护电路板子上的地和外界隔开,对A/D变换也有好处。
4.2 按键抖动
虽然加了一些消除按键抖动电路,但是效果都不太理想,尤其是“高压通”和“高压断”两个按键,由于是上升沿触发,而且状态互锁,致使有时按下“高压通”键,一松手状态就保持不住,又回到“高压断”状态;有时按下“高压断”键又回不到“高压断”状态。用示波器观察波形,发现在按键按下和松开时有抖动。为此对“高压通”和“高压断”键入的信号,利用时钟信号触发D触发器,再通过D触发器送入CPLD,效果非常明显,消除了按键抖动。
4.3 A/D变换的精度
这个问题是整个电路中最关键的问题。500mV的纹波,对逻辑电平不会产生太大的影响,既不会造成错误电平,也不会误报故障,但是对A/D来说,却太大了。
以最大电压5V,8位的A/D来说,最小量化单位δ=×5≈20mV,500mV的纹波,对于十进制=25,对于十六进制是19H,对于二进制是11001B,相当于5位都在跳。对于12位的A/D说,最小量化单位δ=×5==1.2mV,500mV的纹波,对于十进制≈417,对于十六进制是1A1H,对于二进制是110100001B,相当于9位在跳,这样大的纹波,大大影响了A/D的精度。就拿阴极电压来说,12kV的阴极电压,过压门限按5%计算,是12.6kV,那么这600V电压转换成5V电平相当于600/12000×5=250mV,电平的变化淹没在噪声中,根本就体现不出来。不能完成过欠压的精细比较。要想完成精细比较,纹波就得降下来。当纹波小于100mV时,对于8位A/D变化只有3位在变,电平的变化没有淹没在噪声中,是可以使用的,当然纹波处理得越小越好。即使实在降不到太小,还可以通过数字信号处理的方法,用各种数字滤波器,对变换出来的数字信号滤掉干扰。
具体解决的办法如下:
——将采样各路信号的模拟电压通过线性光耦与发射机的地隔离,使发射机的地线噪声不会进控制保护板;
——所有输入的信号都加光耦,使发射机的地与整个控制保护电路的模拟地、数字地隔开;
——整个控保电路的模拟地、数字地悬浮起来,外加屏蔽罩。
采用以上方法后,A/D精度有了明显的改善,能使纹波达到100mV。
5 结语
该控制保护电路板已经在发射机上完成联调,其控制和保护的功能,以及闭环加高压的功能全都实现,精度满足要求。当需要更高采样精度时,则可以用一些数字信号处理的方法来进一步对A/D转换过来的数字量进行处理,使精度进一步提高。
新技术的发展使发射机控制保护电路的技术不断进步,CPLD在实现控制保护电路功能方面有其独到的优势,在国外这种模块化的控制保护电路已经很普遍,跟上国际先进技术应是我们努力的方向。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 谈交互式虚拟三维环境的设计
谈交互式虚拟三维环境的设计








 APP下载
APP下载 登录
登录







