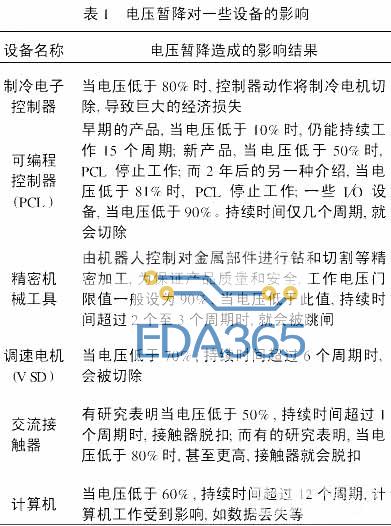
在雷达工作过程中,目标回波信号的强度会有较大起伏,使接收机的输入信号会有相应的变化,变化范围为-100~15 dBm。若要在如此宽的信号变化范围中保持接收设备能对信号进行线性放大,和保持信号不饱和失真,就需要控制接收机的增益,扩展接收机的动态范围,并以此来防止近程杂波及大目标回波使接收机发生过载,实现洲角归一化,使接收机输出的角误差信号强度只与目标偏离天线轴线的夹角有关,而与距离的远近和反射面积的大小无关。在工程实践中,通常用AGC来达到这一目的。
早期雷达采用模拟AGC电路,精度不高,且调试复杂。后经采用EPROM和D/A转换器对模拟衰减器的控制曲线加以修正,提高了对接收机进行调试和补偿的灵活性,但电路集成度低,设备量大。
文中介绍了三路单脉冲雷达接收机DAGC技术的工程实现方法,其是基于A/D转换芯片AD9280、FPGA(XC2V1000)等数字电路,在系统搜索状态采用灵敏度时问控制(STC)及手动增益控制、跟踪状态采用AGC控制,实时调整中频接收机的增益,从而增强系统的灵活性,使得信号处理能够根据雷达工作状态的需要,调整中放模块的增益,甚至改变自动增益控制的方式。
1 三路单脉冲雷达接收机DAGC技术
1.1 组成及工作原理
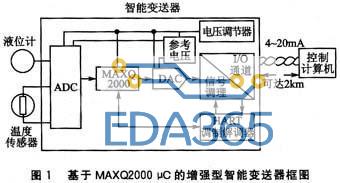
图1为三路单脉冲雷达接收机DACC的组成框图。搜索状态衰减器1受灵敏度时间控制,衰减器2受手动增益控制。跟踪状态和通道AGC,以和通道中频信号作为输入信号。当目标由远至近,回波信号由弱到强时,控制两级衰减器,使得通道中频信号幅度保持不变,与时差通道数控衰减器衰减量与和通道保持一致,从而保证了两个支路输出的角误差信号与目标偏离天线轴线的夹角有关,而与目标的远近大小无关。图中FPGA用来实现数字增益控制。
1.2 STC及手动增益控制的数字化实现
在进行大范围目标搜索时,需要把距离选通波门开得较宽,这可用STC电路来实现。其属于AGC,可用来减轻近距离的地物反射或海浪反射引起的杂波干扰,防止中频放大器产生过载。由于丛林、海浪等地物反射引起的杂波干扰的强度随距离的增大而减小,因此STC电路适用于消弱此种具有特定变化规律的杂波干扰。
具体实现方法是:根据信号的实际情况确定近距离增益值和增益随时间变化的曲线,将这一曲线存储在一个小的临时缓存中,即加载到FPGA内部ROM中,在发射触发脉冲触发时将存储量按一定时间源源不断地读出,产生随时间变化的衰减量曲线,从而实现灵活准确的STC。图2为STC数字实现的框图。
手动增益控制的实现较为简单,其过程是将手动控制电压经A/D变换后送到FPGA,在FPGA内部经数据寄存器输出后送到控制衰减器2,实现手动增益控制。[page]
1.3 跟踪状态自动增益控制数字化实现
跟踪状态自动增益控制是对被跟踪目标的幅值进行采样,根据幅值的大小,反过来控制前端中频放大电路中的衰减器,将信号输出调整到适合检测的幅值范围内。如图1所示,A/D数据输出到FPGA,在FPCA内取测距波门中心的3个值,进行比较,选取最大值,作为被跟踪信号幅值,则有
A(n+1)=A(n)+e(n) (1)
式(1)中,A(n)为第n次脉冲回波周期的衰减量;e(n)为第n周被跟踪信号幅值与各级门限比较所得的增益需要调整dB数;A(n+1)为n+1第次回波周期的衰减量。
每次在修正AGC码之前,需采用求出的差值e(n)对当前衰减量进行修正,将信号调整到设计允许的误差范围内,或者AGC值衰减量达到系统允许的最大值。
各级门限值的确定方法是:首先确定标准门限值λ,标准门限值由A/D转换器的动态范围、接收机的动态范围和噪声电平以及雷达虚警概率共同确定,根据接收机在AGC调整范围内的噪声电平大小,得到相应检测所需的信号幅值,这就是标准门限的下限λ下。门限的上限λ上由A/D转换器的动态范围决定,为防止信号饱和,一般低于A/D转换器可测量值3 dB,例如,如果最大量程为±1 V,则可取信号调整到位时的最大幅值为0.707 V。当信号幅值处于标准门限值之间时,e(n)值为0。然后根据衰减器步跳量及信号最大起伏量确定剩余各级门限值,则有
e(n)=20lg(λx/λ上) (2)
式(2)中,λx为各级门限值,假设衰减器的步跳量为0.5 dB,则由e(n)分别等于0.5,1.0,1.5,…,计算出各级门限值λ1,λ2,λ3,…,设信号幅值为V,则当λ上
2 工程中问题的解决
2.1 中放增益控制问题
系统搜索状态中的两级衰减器分别受灵敏度时间控制和手动增益控制,当雷达发现目标时,操作手在按跟踪键之前,需调整手动增益,以使目标回波在系统跟踪所要求的电平范围内。解决办法,是将自动增益控制的初始值设为测距波门中心点处的灵敏度时间控制值和手动增益控制值之和,这样信号能快速调整到标准门限之内,对近距离目标有效。此方法已成功应用于工程中,可在8个雷达工作周期内实现目标回波输出稳定。
2.2 频率捷变状态中通道增益问题
采用频率捷变体制的宽带雷达系统中,带内增益很难保持一致,回波信号幅度会有较大变化,有时甚至影响跟踪的稳定性。解决方法是测出雷达通道在不同频点的增益差值,频率变化时在数字AGC控制下对不同频点的增益差值进行补偿。
2.3 衰减量波动问题
在进行信号处理时,需检测和支路信号中输入信号的电平。但是,当幅值处于调节衰减的临界状态时,由于电平检测的波动性和滞后性,使得即使输入信号的电平没有发生较大的变化,其估计值也时常会在某一AGC值左右震荡。这样就会出现中频增益反复调整的现象,使输出电平不稳,雷达系统无法进入稳定跟踪状态。解决方案是使加上衰减与撤去衰减的门限不同。根据雷达目标检测的特性,可以令加上衰减的门限高,而撤去衰减的门限低来解决,在系统中衰减器最小衰减量为0.5dB,所以设计的门限上限和下限之间差值>0.5dB。
2.4 冲击振荡问题
由于数控衰减器的开关作用时会在输出端产生冲击振荡,其会对中频信号造成干扰,成为假目标。工程设计中,通过手动增益控制和自动增益控制的时序调整,即手动增益控制码的变化控制在雷达休止期,自动增益控制码的变化控制在测距波门的前后沿,从而解决冲击振荡干扰问题。由于灵敏度时间控制无法通过时序调整来解决,所以系统中衰减器1应采用模拟衰减器,其有效地解决了冲击震荡问题。搜索状态下的视频输出波形如图3所示,跟踪状态下的视频输出波形如图4所示。
2.5 接收机增益控制中存在的问题
用数字AGC技术实现对接收机增益控制仍存在一些问题亟待解决。如果雷达在受到同频异步信号干扰时,使用这种数字化的干扰信号进行AGC时,可能导致衰减量被迅速调整到一个背离实际情况的值,从而丢失目标。因此,在软件设计上应采取一些措施,避免此情况出现。另外,当目标检测过程中采用多脉冲积累技术时,如果区域内存在目标或者噪声突然增强或减弱,在一次脉冲积累过程中由于不调整AGC,会出现接收机饱和或信号丢失现象,这是应用数字AGC技术时应当注意的问题。
3 结束语
数字AGC技术调节方便、反馈快捷、精度高,从而增强了对接收中频放大模块的控制能力,有利于提高系统的检测和跟踪性能。目前,大量可编程逻辑器件集成度越来越高,IP核也越来越多,性价比也越来越好,为数字化自动增益制技术的应用提供了有利的硬件平台。文中介绍的单脉冲雷达接收机DAGC技术,已在某型号雷达的研制中具体应用,解决了工程应用中的许多实际问题,收到了良好的效果。










 热门文章
更多
热门文章
更多

 谈交互式虚拟三维环境的设计
谈交互式虚拟三维环境的设计








 APP下载
APP下载 登录
登录







