×


ADS1246是TI公司大致在2009年中期推出的24位ADC,最高采样速率可达2Ksps,其为单通道器件,与之相对应的还有ADS1247和ADS1248三通道器件,但特性并非完全一致。据TI资料介绍,ADS1246在ADS1247/ADS1248功能上做出简化,保留了其部分特性。本次设计,需要用到24位单通道转换器件,于是考虑用到ADS1246,主控制器用STM32L系列。以下为ADS1246的引脚图
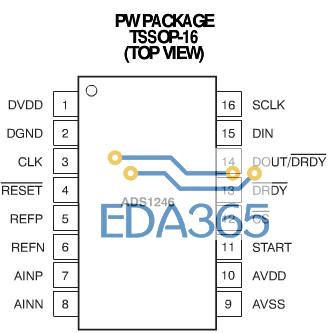
上图显示ADS1246引脚图,其CS/SCLK/DIN/DUT为SPI通讯接口,RESET/START/DRDY为控制与状态脚,AVDD/AVSS以及DVDD/DGND分别为模拟/数字电源供电端,REFP/REFN为基准源输入脚,AINP/AINN为模拟信号输入端。其中,DRDY忙信号指示功能可以附加到DOUT引脚上,这样DRDY脚可以留空。在实际使用中发现,START脚做为ADC的启动脚,还必须得接出来,因我还未找到有通过软件能启动ADS1246转换的方法,但其DS中有提到START信号和SLEEP/WAKEUP相类似的功能,暂未深研究。顺便 提一下,TI关于ADS1246的文档是改自于另一颗ADC器件的文档,所以极其烂……
ADS1246的SPI时序,这个是需要提一下的,一般来说,SPI协议在上升沿锁存数据,下降沿更新数据,这是一般SPI协议的作法。但ADS1246需要在下降沿锁存数据,上升沿更新数据,在设置SPI寄存器的时候需要注意一下,当我采用一般性设置的时候,发现通讯不正常。以下是STM32L的SPI设置,用的是SPI2。
//SPI2配置
RCC-》APB1ENR|=RCC_APB1ENR_SPI2EN;
SPI2-》CR1=SPI_CR1_MSTR|SPI_CR1_BR|SPI_CR1_SSM|SPI_CR1_SSI|SPI_CR1_CPHA;//8位模式
SPI2-》CR1|=SPI_CR1_SPE;
SPI2的驱动:
//SPI2写数据
voidSPI2_WriteBytes(uint8*TxBuffer,uint16TxLenth)
{
uint8i;
while(TxLenth--){
while((SPI2-》SR&SPI_SR_TXE)==0);
SPI2-》DR=*TxBuffer++;
while((SPI2-》SR&SPI_SR_RXNE)==0);
i=SPI2-》DR;
}
i++;
}
上程序中i++的引入在于避免keil-MDK产生编译警告。
//SPI2读数据
voidSPI2_ReadBytes(uint8*RxBuffer,uint16RxLenth)
{
while(RxLenth--){
while((SPI2-》SR&SPI_SR_TXE)==0);
SPI2-》DR=*RxBuffer;
while((SPI2-》SR&SPI_SR_RXNE)==0);
*RxBuffer++=SPI2-》DR;
}
}
以上驱动代码,能保证SPI在最后一个字节完全发送完成之后退出,如果没有等待SPI_SR_RXNE,则仅仅只是把数据转移到SPI移位寄存器,并未完全送出,不详述。
以下介绍我的驱动过程,在驱动ADS1246的时候,主要参考那个网方的58页的极烂文档,上面没有明确提到整个上电过程以及初始化过程,至于那个相当重要的自校准过程及操作方法也没有提到,所以本人摸索了一整天时间,在此整理。
ADS1246采用SPI通讯 ,其所有通讯引脚(SCK/DIN/DOUT)都在CS脚为低电平的时候有效,在CS为高时均为三态,当DRDY绑定到DOUT脚时,只有在CS为低时才能正确的指示忙状态,若DRDY采用单独的引脚,则不受CS控制。ADS1246的所有通讯过程被分为若干个命令组,有的需要带参数,有的不需要带参数,其实我也不明白它为什么要搞那么麻烦,感觉本来可以很简单的处理,结果弄的很乱。以下为其命令分组:
大致分为命令类(不带参数),读寄存器,写寄存器三类,以下分别分其实现:
//ADS1246命令码列表
#defineADC_CMD_WAKEUP0x00//退出睡眠模式
#defineADC_CMD_SLEEP0x02//进入睡眠模式
#defineADC_CMD_SYNC0x04//同步ADC转换
#defineADC_CMD_RESET0x06//芯片复位
#defineADC_CMD_NOP0xFF//空操作
#defineADC_CMD_RDATA0x12//单次读取数据
#defineADC_CMD_RDATAC0x14//连续读取数据
#defineADC_CMD_SDATAC0x16//停止连续读取
#defineADC_CMD_RREG0x20//读寄存器
#defineADC_CMD_WREG0x40//写寄存器
#defineADC_CMD_SYSOCAL0x60//系统偏移校准
#defineADC_CMD_SYSGCAL0x61//系统增益校准
#defineADC_CMD_SELFOCAL0x62//系统自校准
#defineADC_CMD_RESTRICTED0xF1//
/*---------------------------------------------------------
写命令
---------------------------------------------------------*/
voidADS1246_WriteCmd(uint8Cmd)
{
ADC_SPI_CS_CLR
ADC_WriteBytes(&Cmd,1);
ADC_SPI_CS_SET
}
/*---------------------------------------------------------
读寄存器
---------------------------------------------------------*/
voidADS1246_ReadReg(uint8RegAddr,uint8*Buffer,uint8Length)
{
uint8Cmd[2];
ADC_SPI_CS_CLR
Cmd[0]=ADC_CMD_RREG|RegAddr;
Cmd[1]=Length-1;
ADC_WriteBytes(Cmd,2);
ADC_ReadBytes(Buffer,Length);
Cmd[0]=ADC_CMD_NOP;
ADC_WriteBytes(Cmd,1);
ADC_SPI_CS_SET
}
/*---------------------------------------------------------
写寄存器
---------------------------------------------------------*/
voidADS1246_WriteReg(uint8RegAddr,uint8*Buffer,uint8Length)
{
uint8Cmd[2];
ADC_SPI_CS_CLR
Cmd[0]=ADC_CMD_WREG|RegAddr;
Cmd[1]=Length-1;
ADC_WriteBytes(Cmd,2);
ADC_WriteBytes(Buffer,Length);
ADC_SPI_CS_SET
}
在写读存器时,一定要注意,根据其DS文档第32页说明,其后发一个NOP命令可以强制DOUT引脚输出高电平,这样可以随后判断DOUT是否为低进而知道是否处于忙状态,否则会得到一个脉冲。其实在任何的读操作完成后,发一个字节的NOP命令即可将DOUT强制输出高电平。当DRDY绑定到DOUT的时候,这个是非常重要的。
在弄清楚以上命令读写方法之后,需要实现其忙状态判别,这个在很多芯片驱动时都会遇到,它直接提示了其内部的工作状态,只有在不忙时才能继续执行下一条指令。
/*---------------------------------------------------------
忙状态判断,最长等待时间,200X10ms=2S
-------------------------
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

") 实验八 交通灯控制(80C51单片机汇编语言编程)
实验八 交通灯控制(80C51单片机汇编语言编程)




 APP下载
APP下载 登录
登录







