×


在篇文章中主要讲讲调试中断过程中获得的知识,也许会对大家有用。
大家应该都知道在使用S3C2440这块芯片时,有一个十分大的问题,就是对于keil软件自带的初始化代码没有给全,在初始化代码中主要做了以下几件事
可以看出,也就是对I/O口进行了配置,看门狗,时钟进行了初始化,同时也对内存块进行了一定的配置,是十分基本的一些初始化,其中对于中断向量表根本就没有进行建立,因此如果要用他的文件进行中断的实验,必须自己去改动初始化代码,完成他没有完成的工作,自己尝试了一下,没有成功,因此就对ADS事例程序的初始化代码进行移植(参看某大神的教程实现,)
一、ARM中断的执行方式
这里中断有两种,一种外部中断,一种内部中断,对于两种中断稍有不同,原理相似,我以外部中断进行介绍。
1)当然首先必须配置好各种寄存器,当外部中断在满足条件的时候会发生中断,这时EINTPEND这个寄存器的对应位会被写为1,其中这个寄存器可以有多位置一
2)再继续和EINTMASK这个寄存器进行操作,如果触发的中断没有被屏蔽,则可以产生,这时SRCPND对应的位置会置1,当然SRCPND这个寄存器也可能会多位被置1,仅仅表示此时有多个中断发生了。
3)查看中断模式,是普通中断还是快速中断,如果是快速中断直接进入FIQ异常,如果是普通中断还需要进行后续操作。
4)如果是普通中断,再与INTMSK进行操作,操作后,如果还有多个中断,则进入中断判优,最终对INTPND中的某一位进行置1,表示某个中断产生并相应。注意INTPND这个寄存器有且仅有一位能够被置1。
以上就是有中断来了后,整个硬件操作的过程,因此我们可以看出,其实我们有时候可以不通过中断服务的方式来进行,直接进行中断位这些标志的查询就可以了,(类似单片机),但是这样没有任何效率的提升了。
对于复位、未定义指令、软件中断、指令异常、数据异常、普通中断、快速中断,在这里我们叫他们异常
对于普通中断中具体的中断,我们才叫中断。
对于以上异常发生时,都会有一个固定的跳转地址,即异常向量表:
| 地址 | 异常 |
| 0x0000,0000 | 复位 |
| 0x0000,0004 | 未定义指令 |
| 0x0000,0008 | 软件中断 |
| 0x0000,000c | 指令异常 |
| 0x0000,0010 | 数据异常 |
| 0x0000,0014 | 保留 |
| 0x0000,0018 | 普通中断 |
| 0x0000,001c | 快速中断 |
下面是当进入IRQ中断发生后,软件方面的一些操作:
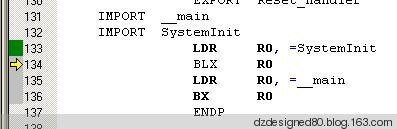
1)当中断产生时,程序会自动的跳转到0x0000,0018这个地址上去,在这个地址上一般会有一个跳转指令,就可以直接跳转到异常处理函数。
2)但是对于普通中断异常中还有相当多的中断,因此对于普通中断异常跳入的异常处理函数不是一个正真的处理函数,而是一个中断偏移在此跳转的中间过程。其函数如下:
;呵呵,来了来了.好戏来了,这一段程序就是用来进行第二次查表的过程了.
;如果说第一次查表是由硬件来完成的,那这一次查表就是由软件来实现的了.
;为什么要查两次表??
;没有办法,ARM把所有的中断都归纳成一个IRQ中断异常和一个FIRQ中断异常
;第一次查表主要是查出是什么异常,可我们总要知道是这个中断异常中的什么中断呀!
;没办法了,再查一次表呗!
;===================================================================================
;//外部中断号判断,通过中断服务程序入口地址存储器的地址偏移确定
;//PC=[HandleEINT0+[INTOFFSET]]
;H|------|
; |/ / / |
; |--isr-| ====>pc
;L|--r8--|
; |--r9--|
IsrIRQ
sub sp,sp,#4 ;给PC寄存器保留 reserved for PC
stmfd sp!,{r8-r9} ;把r8-r9压入栈
ldr r9,=INTOFFSET ;把INTOFFSET的地址装入r9 INTOFFSET是一个内部的寄存器,存着中断的偏移
ldr r9,[r9] ;I_ISR
ldr r8,=HandleEINT0 ;这就是我们第二个中断向量表的入口的,先装入r8
;===================================================================================
;哈哈,这查表方法够好了吧,r8(入口)+index*4(别望了一条指令是4 bytes的喔),
;这不就是我们要找的那一项了吗.找到了表项,下一步做什么?肯定先装入了!
;==================================================================================
add r8,r8,r9,lsl #2 ;地址对齐,因为每个中断向量占4个字节,即isr = IvectTable + Offeset * 4
ldr r8,[r8] ;装入中断服务程序的入口
str r8,[sp,#8] ;把入口也入栈,准备用旧招
ldmfd sp!,{r8-r9,pc} ;施招,弹出栈,哈哈,顺便把r8弹出到PC了,跳转成功!
这段语句就实现了普通中断异常到具体中断的偏移处理。
这样就可以跳转到具体的中断处理程序中了。
对于如果用S3C2440.S这个初始化文件,肯定是没有二次查表,并且也没有建立后续具体中断的偏移地址,这样如果我们自己仅仅在S3C2440.S添加出硬件中断发生后,异常跳转,让异常跳转到一个C程序中,再在C程序中检测INTPND这个寄存器的值,根据这个置调用不同的子函数也可以实现中断。(当然在跳转过程中,从正常情况进入中断异常,需要进行模式转换,栈的保存等)
二、在ARM中执行中断时,内存的映射情况
第一部分所说的直接跳转地址,都是硬件执行时直接使用的地址,当MMU没有开启的时候,上面的地址就是物理地址,直接去实际的那块地址,但是当MMU开启后,上面的地址就是虚拟地址(开启MMU之后,所有使用的地址都应该是虚拟地址了,都会被映射到某一块对应的物理地址中去)。但是从keil forARM的工程配置
我们程序代码是从ROM1的0x3000,0000这里开始存放的,因此如果产生中断了,MMU没有开启,那硬件直接去访问0x0000,0000这里,是不可能找到我们的代码,这时候程序就跑飞了。因此为了当硬件去访问0x0000,0000时,其实访问的是ROM1的0x3000,0000,我们必须开启MMU把0x0000,0000变成一个虚拟的地址,这个虚拟地址映射的实际物理地址是0x3000,0000,这里我们就需要介绍一个函数MMU_SetMTT,源代码如下
void MMU_SetMTT(int vaddrStart,int vaddrEnd,int paddrStart,int attr)
{
volatile U32 *pTT;
volatile int i,nSec;
pTT=(U32 *)_MMUTT_STARTADDRESS+(vaddrStart>>20);
nSec=(vaddrEnd>>20)-(vaddrStart>>20);
for(i=0;i<=nSec;i++)*pTT++=attr |(((paddrStart>>20)+i)<<20);
}
在内存映射中增加MMU_SetMTT(0x00000000,0x03F00000,0x30000000,RW_CB);
或者增加MMU_SetMTT(0x00000000,0x03f00000,(int)__ENTRY,RW_CB); 因为ENTRY就是等于0x30000000;
这样在中断产生的时候就不会跑飞了,并且能按照程序代码找到对应中断入口等。
三、特别提醒
在上面两个问题解决后,顺利的把中断调试通过,但是需要注意的小细节是:
1)在每次中断发生后,记得要对中断进行清除,并且清除的过程是从内部向外部清除,
2)在对于的中断函数一定要记住挂载对应的中断向量地址上,不然同样程序会跑飞,如果没有注意这里,可能会调试很久。
四、中断向量表
这是初始化代码中用于上面二次偏移的标号,定义在RAM中
ALIGN
AREA RamData, DATA, READWRITE
^ _ISR_STARTADDRESS ; _ISR_STARTADDRESS=0x33FF_FF00
HandleReset # 4
HandleUndef # 4
HandleSWI # 4
HandlePabort # 4
HandleDabort # 4
HandleReserved # 4
HandleIRQ # 4
HandleFIQ # 4
;Do not use the label 'IntVectorTable',
;The value of IntVectorTable is different with the address you think it may be.
;IntVectorTable
;@0x33FF_FF20
HandleEINT0 # 4
HandleEINT1 # 4
HandleEINT2 # 4
HandleEINT3 # 4
HandleEINT4_7 # 4
HandleEINT8_23 # 4
HandleCAM # 4 ; Added for 2440.
HandleBATFLT # 4
HandleTICK # 4
HandleWDT # 4
HandleTIMER0 # 4
HandleTIMER1 # 4
HandleTIMER2 # 4
HandleTIMER3 # 4
HandleTIMER4 # 4
HandleUART2 # 4
;@0x33FF_FF60
HandleLCD # 4
HandleDMA0 # 4
HandleDMA1 # 4
HandleDMA2 # 4
HandleDMA3 # 4
HandleMMC # 4
HandleSPI0 # 4
HandleUART1 # 4
HandleNFCON # 4 ; Added for 2440.
HandleUSBD # 4
HandleUSBH # 4
HandleIIC # 4
HandleUART0 # 4
HandleSPI1 # 4
HandleRTC # 4
HandleADC # 4
;@0x33FF_FFA0
END
上面的数据与后面
// Exception vector
#define pISR_RESET (*(unsigned *)(_ISR_STARTADDRESS+0x0))
#define pISR_UNDEF (*(unsigned *)(_ISR_STARTADDRESS+0x4))
#define pISR_SWI (*(unsigned *)(_ISR_STARTADDRESS+0x8))
#define pISR_PABORT (*(unsigned *)(_ISR_STARTADDRESS+0xc))
#define pISR_DABORT (*(unsigned *)(_ISR_STARTADDRESS+0x10))
#define pISR_RESERVED (*(unsigned *)(_ISR_STARTADDRESS+0x14))
#define pISR_IRQ (*(unsigned *)(_ISR_STARTADDRESS+0x18))
#define pISR_FIQ (*(unsigned *)(_ISR_STARTADDRESS+0x1c))
// Interrupt vector
#define pISR_EINT0 (*(unsigned *)(_ISR_STARTADDRESS+0x20))
#define pISR_EINT1 (*(unsigned *)(_ISR_STARTADDRESS+0x24))
#define pISR_EINT2 (*(unsigned *)(_ISR_STARTADDRESS+0x28))
#define pISR_EINT3 (*(unsigned *)(_ISR_STARTADDRESS+0x2c))
#define pISR_EINT4_7 (*(unsigned *)(_ISR_STARTADDRESS+0x30))
#define pISR_EINT8_23 (*(unsigned *)(_ISR_STARTADDRESS+0x34))
#define pISR_CAM (*(unsigned *)(_ISR_STARTADDRESS+0x38)) // Added for 2440.
#define pISR_BAT_FLT (*(unsigned *)(_ISR_STARTADDRESS+0x3c))
#define pISR_TICK (*(unsigned *)(_ISR_STARTADDRESS+0x40))
#define pISR_WDT_AC97 (*(unsigned *)(_ISR_STARTADDRESS+0x44)) //Changed to pISR_WDT_AC97 for 2440A
#define pISR_TIMER0 (*(unsigned *)(_ISR_STARTADDRESS+0x48))
#define pISR_TIMER1 (*(unsigned *)(_ISR_STARTADDRESS+0x4c))
#define pISR_TIMER2 (*(unsigned *)(_ISR_STARTADDRESS+0x50))
#define pISR_TIMER3 (*(unsigned *)(_ISR_STARTADDRESS+0x54))
#define pISR_TIMER4 (*(unsigned *)(_ISR_STARTADDRESS+0x58))
#define pISR_UART2 (*(unsigned *)(_ISR_STARTADDRESS+0x5c))
#define pISR_LCD (*(unsigned *)(_ISR_STARTADDRESS+0x60))
#define pISR_DMA0 (*(unsigned *)(_ISR_STARTADDRESS+0x64))
#define pISR_DMA1 (*(unsigned *)(_ISR_STARTADDRESS+0x68))
#define pISR_DMA2 (*(unsigned *)(_ISR_STARTADDRESS+0x6c))
#define pISR_DMA3 (*(unsigned *)(_ISR_STARTADDRESS+0x70))
#define pISR_SDI (*(unsigned *)(_ISR_STARTADDRESS+0x74))
#define pISR_SPI0 (*(unsigned *)(_ISR_STARTADDRESS+0x78))
#define pISR_UART1 (*(unsigned *)(_ISR_STARTADDRESS+0x7c))
#define pISR_NFCON (*(unsigned *)(_ISR_STARTADDRESS+0x80)) // Added for 2440.
#define pISR_USBD (*(unsigned *)(_ISR_STARTADDRESS+0x84))
#define pISR_USBH (*(unsigned *)(_ISR_STARTADDRESS+0x88))
#define pISR_IIC (*(unsigned *)(_ISR_STARTADDRESS+0x8c))
#define pISR_UART0 (*(unsigned *)(_ISR_STARTADDRESS+0x90))
#define pISR_SPI1 (*(unsigned *)(_ISR_STARTADDRESS+0x94))
#define pISR_RTC (*(unsigned *)(_ISR_STARTADDRESS+0x98))
#define pISR_ADC (*(unsigned *)(_ISR_STARTADDRESS+0x9c))
完全相互对应,因此这样就可以解释为什么直接挂载到这些预定义的常数上,就可以跳转到中断了。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

----时钟配置.例程分析") 浅谈msp430f5529入门(2)----时钟配置.例程分析
浅谈msp430f5529入门(2)----时钟配置.例程分析





 APP下载
APP下载 登录
登录







