×


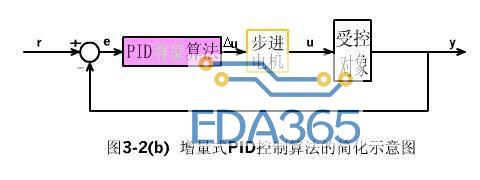
当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID的“增量算法”。
 (2-5)
(2-5)
将(2-4)与(2-5)相减并整理,就可以得到增量式PID控制算法公式为:
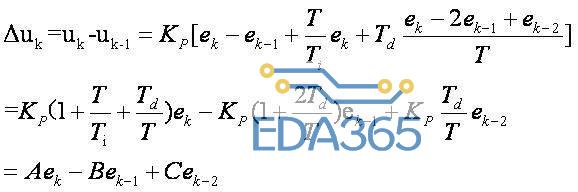 (2-6)
(2-6)
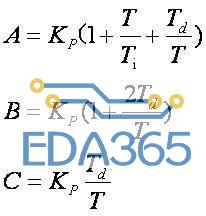
其中
增量式PID控制算法与位置式PID算法(2-4)相比,计算量小得多,因此在实际中得到广泛的应用。
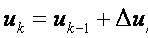
位置式PID控制算法也可以通过增量式控制算法推出递推计算公式:
 (2-7)
(2-7)
(2-7)就是目前在计算机控制中广泛应用的数字递推PID控制算法。
增量式PID控制算法C51程序
typedef struct PID
{
int SetPoint;
long SumError;
double Proportion;
double Integral;
double Derivative;
int LastError; //Error[-1]
int PrevError; //Error[-2]
} PID;
static PID sPID;
static PID *sptr = &sPID;
void IncPIDInit(void)
{
sptr->SumError = 0;
sptr->LastError = 0;
sptr->PrevError = 0;
sptr->Proportion = 0;
sptr->Integral = 0;
sptr->Derivative = 0;
sptr->SetPoint = 0;
}
int IncPIDCalc(int NextPoint)
{
register int iError, iIncpid;
iError = sptr->SetPoint - NextPoint;
iIncpid = sptr->Proportion * iError
- sptr->Integral * sptr->LastError
+ sptr->Derivative * sptr->PrevError;
//存储误差,用于下次计算
sptr->PrevError = sptr->LastError;
sptr->LastError = iError;
//返回增量值
return(iIncpid);
}
关键字:51单片机 增量式 PID控制算法『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 FPGA和AVR单片机的自动调谐系的设计
FPGA和AVR单片机的自动调谐系的设计






 APP下载
APP下载 登录
登录







