×


(可以参考http://blog.sina.com.cn/s/blog_8240cbef01018hu1.html)
"控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。"
简单的来讲,就是输出一个周期为20Ms,不同的占空比对应舵机转过不同的角度。
难点主要在于
舵机控制信号需要保持,这样就比用脉冲控制步进电机要复杂一些。
你需要保持多路PWM,并且要随时调节占空比来获得要求的角度
网上有用工作在相频修正PWM模式下的T1来产生信号,这样虽然十分精确,然而并不太好实现多路控制.(至少我是没想出来,如果有高手知道怎么做,还望多多指教)
我决定采用以下方法:
将 20ms 等分成240份,这样一份是20000/240 us //分成240份的原因是这样可以算出整数值得TCNT1
将T1配置为溢出中断模式,每20000/240 us溢出一次
中断服务程序更新TCNT1的值,维护一组变量,产生信号。
这样做的优点是方便了多路控制。虽然我只控制了四路舵机,稍加修改就可以控制更多..
然而中断服务程序中维护变量时,产生的微小误差会累加,这样不可避免的会产生较大误差。直接采用计算值肯定不行,最后需要修正。
代码还是相当的不成熟...愿各位高手多多指教.
通过传入一个指针给Servo_AngelPWM实现四个舵机的角度控制
#include
#include
#ifndef SERVO_CONTROL_H
#define SERVO_CONTROL_H
#define Servo1 PB7
#define Servo1_1 PORTB|=_BV(Servo1)
#define Servo1_0 PORTB&=~_BV(Servo1)
#define Servo2 PB6
#define Servo2_1 PORTB|=_BV(Servo2)
#define Servo2_0 PORTB&=~_BV(Servo2)
#define Servo3 PB5
#define Servo3_1 PORTB|=_BV(Servo2)
#define Servo3_0 PORTB&=~_BV(Servo2)
#define Servo4 PB4
#define Servo4_1 PORTB|=_BV(Servo2)
#define Servo4_0 PORTB&=~_BV(Servo2)
#define to_us(x) (((x/180.0)*2.0+0.5)*1000)
uint32_t Servo_Flag[4];
uint32_t Servo_Cflag=0;
void Servo_AngelPWM(char *angel)
{
for(int i=0;i<4;i++)
Servo_Flag[i]=to_us(angel[i])*3/250;
TIMSK|=_BV(TOIE1);//开启TC1中断
}
ISR(TIMER1_OVF_vect)
{
TIMSK&=~_BV(TOIE1);//关闭TC1中断 //1
TCNT1=64525;//65535-(1000+10)这个10加的有讲究 //3
Servo_Cflag++; //4
if(Servo_Cflag>=239) //5
{
Servo1_1;
Servo2_1;
Servo3_1;
Servo4_1;
Servo_Cflag=0;
}
else if(Servo_Flag[0]==Servo_Cflag)Servo1_0; //6
else if(Servo_Flag[1]==Servo_Cflag)Servo2_0; //7
else if(Servo_Flag[2]==Servo_Cflag)Servo3_0; //8
else if(Servo_Flag[3]==Servo_Cflag)Servo4_0; //9
TIMSK|=_BV(TOIE1);//开启TC1中断 //10
}
#endif
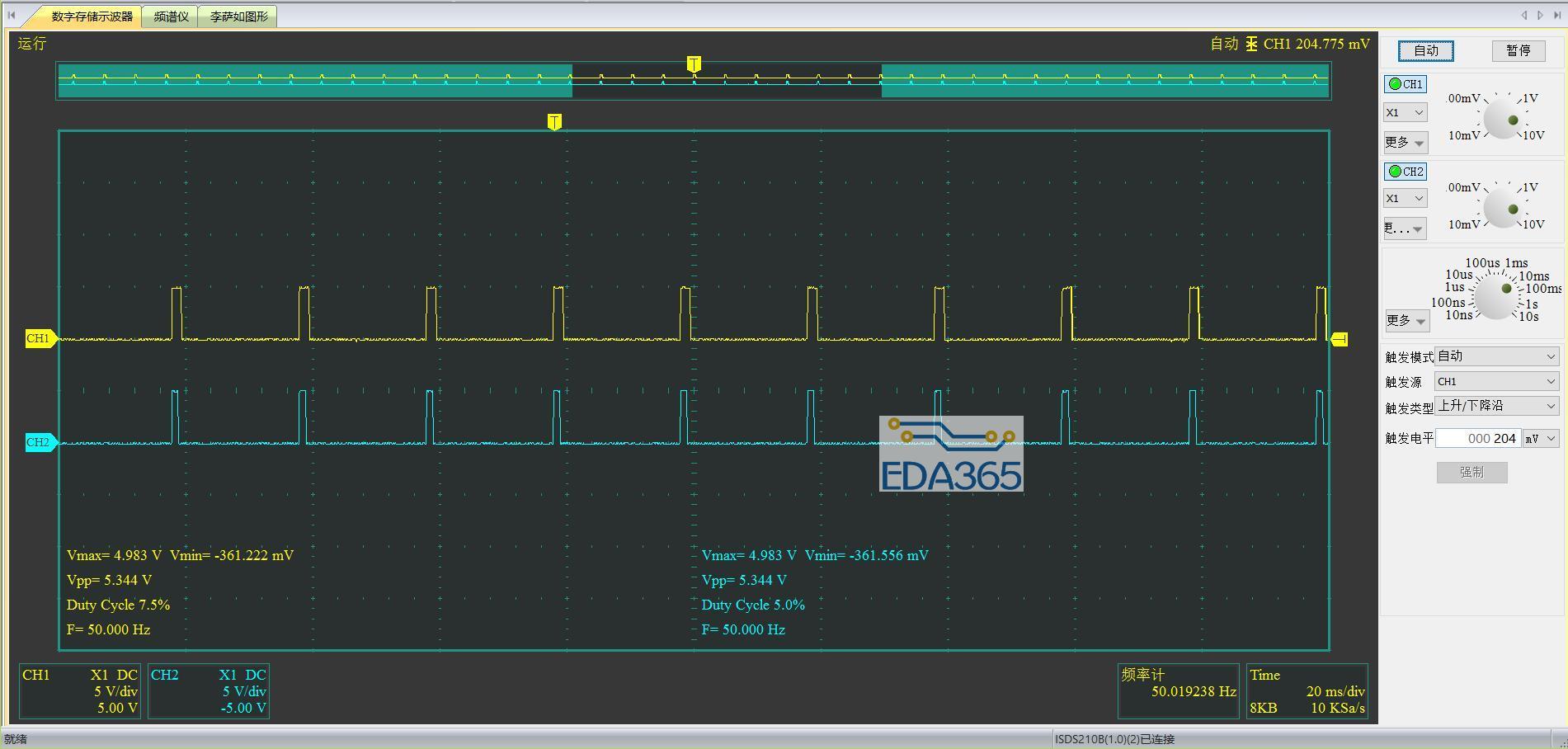
给TCNT1赋计算值,也就是65535-1000=64525时,产生的信号大约是47HZ。如我所料,准确性比较差。
然后尝试根据分析语句来修正TCNT1的初值,可以从我的注释看出...修正完后大约是48hz,还是不太准。
最后直接上示波器微调了...当TCNT1为64569(修正值34)时,如上图,产生了比较准确的驱动信号(45度和90度)。
(所以说学会汇编还是很重要的...有时间一定要研究研究)
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 STM32单片机的复用端口初始化的步骤及方法
STM32单片机的复用端口初始化的步骤及方法





 APP下载
APP下载 登录
登录







