×


本文介绍汽车自动巡航控制系统的结构组成和工作原理,选择基于Atmega 8单片机的PID控制策略实现车辆的稳定行驶及加速、减速的控制过程。本系统能有效地减轻长途驾驶中驾驶员的工作强度,提高舒适性,并减少燃料消耗,利于环保。
据调查,10%的交通事故是由疲劳驾驶、操作不当引起的,本文介绍的汽车自动巡航控制系统可以有效地减轻驾驶员的疲劳,避免交通事故,并利于环保。当在高速公路上长时间行驶时,打开该系统的自动操纵开关后,巡航控制系统将根据行车阻力自动增减节气门开度,避免驾驶员频繁踩油门踏板就可使汽车行驶速度保持一定,大大地减轻了驾驶员的疲劳强度。由于巡航控制系统能自动地维持车速,避免了油门踏板不必要的人为变动,进而减少了汽车燃料的消耗和废气的排放。
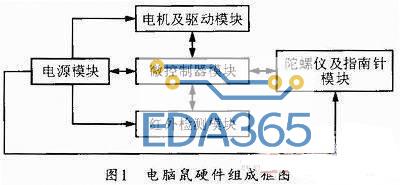
汽车电子自动巡航控制系统主要由巡航控制开关、车速传感器、电子控制单元(ECU)、汽车制动开关、执行器等组成。电子自动巡航控制系统的组成部分及各部分在汽车内的安装如图1所示。
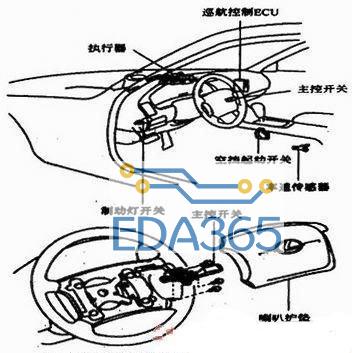
下面将具体介绍各部分结构原理及功能。
(1)巡航控制开关。当接通主开关后,若车速在巡航控制的范围内(一般为40~200km/h)时,断开“设定/滑行”开关,此时车速会存储于RAM中,汽车维持此速度稳定行驶。当驾驶员希望巡航的车速提高时,接通“恢复/加速”开关,巡航控制ECU就会通过执行器使节气门的开度增大,使汽车加速行驶,此时,存储汽车实际车速参数的RAM存储器处于动态刷新状态,开关断开瞬间时的车速存储于存储器,之后汽车将以此速度匀速行驶;当驾驶员希望稳定的车速降低时,接通“设定/滑行”开关,巡航控制ECU就会通过执行器使节气门开度关小,汽车减速滑行,此时存储汽车实际车速参数的RAM存储器处于动态刷新状态,开关断开瞬间时的车速存储于存储器,之后汽车将以此速度匀速行驶。
(2)巡航控制ECU。用于接收各个传感器送来的信号,再经计算、加工处理后,向执行器发出指令,控制执行器的动作。
(3)空档启动开关。用于控制是否使汽车立即退出巡航控制状态。
(4)制动开关。安装于制动踏板处,用于向巡航控制ECU传送制动信号(即驾驶员踩下制动踏板的信号)以使汽车迅速退出巡航控制状态。
(5)车速传感器。车速传感器采集实际实时车速信号,作为电子控制单元的输入量。
图2是一种典型的双闭环汽车电子巡航控制系统原理框图。由图2可知,控制器的输入是设定的固定车速信号与实际车速的反馈信号之差。ECU将这两种信号进行比较,得出误差信号,经放大、处理后成为节气门控制信号,送至节气门执行器,驱动节气门执行器工作,调节发动机节气门开度,以修正实际车速,从而将实际车速很快调整到驾驶员设定通常将汽车在平坦路面上行驶时车速与节气门开度的关系存储在巡航控制系统ECU的ROM中。巡航控制系统根据目标车速自动维持汽车恒速行驶。
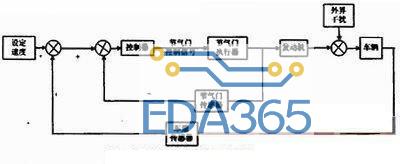
汽车在巡航定速状态下,当汽车速度下降时,ECU加大节气门开度,使发动机功率升高,转矩增大,车速达到设定速度。反之,减小节气门的开度。系统进行巡航控制时,若在平坦路面上车速为v,按下设定开关进入巡航控制的自动行驶状态,一旦遇到爬坡时,则行驶阻力增加,如不进行调节控制,车速就会降低,此时巡航控制器会按照一定的控制规则使节气门开度变大,使车速稳定在v,重新取得动力平衡。当遇到下坡时,行驶阻力减小,巡航控制系统调节节气门的开度变小,使车速保持在v取得平衡。因此,即使行驶阻力发生变化,车速也只在很小范围内变化,达到稳定行驶的目的。当车速超出特定上下限时,巡航系统不工作。这个上下限的范围并不固定依车型的不同而略有差别。
当系统的传感器出现故障,或控制信号电路被切断时,传感器输出为零,此时车速超出特定上下限,巡航控制系统停止工作。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 ARM基础知识八
ARM基础知识八




 APP下载
APP下载 登录
登录







