×


随着计算机技术和信息技术在各个领域的快速发展、极大的促进了智能机器人的研究,其中智能移动机器人占有重要地位、移动机器人能完成人类在生产生活当中不能完成的任务,可以替代人类完成一些特殊的任务,同时在生产生活及军事等领域不仅需要能自动控制的机器人,同时也需要具有数据采集,能随时进行自动与手动等模式切换的智能移动机器人。
智能巡逻车属于移动机器人的一种,利用蓝牙传输无线数据,具有稳定性强的特点,经过测试在空旷地可在20m范围内对巡逻车进行数据的传输、在自动、遥控、寻迹三种模式下可随时切换并可以在各个模式下选择手动单个数据或自动进行所有数据的动态采集(可用上位机调周期),上位机项目组采用Visual Basic进行开发、与巡逻车兼容性强、数据传输稳定,巡逻车可用于工业环境中的多点数据采集、灵活壁障,及火灾现场探测,危险气体泄漏现场勘查等自然灾害。
2 系统硬件设计
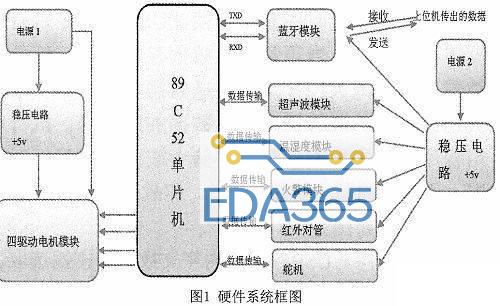
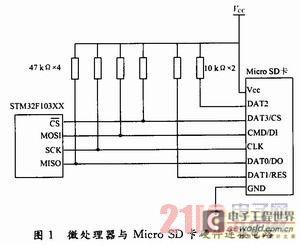
本智能巡逻车以C89c51单片机作为核心,硬件系统框图如图1所示,在恶劣的环境中巡逻车的稳定性是非常重要的前提,所以巡逻车用四轮驱动(单片机同时控制四个直流电机)的方式作为底盘。巡逻车的结构分为两个部分,分别是电脑上位机和硬件系统组装小车,电脑上位机用于显示小车所在的工作环境下传回周边的环境参数及控制巡逻车的工作,保证实时的对工作环境进行检测,巡逻车能用于在人为无法工作环境下工作。
2.1 电机驱动模块
驱动电路核心芯片L298N可以实现电机正反转调速,启动性能好,工作电压高,启动转矩大,可同时驱动两个电机等特点,内含两个H桥的高电压大电流全桥式驱动器,可以驱动两台直流电机。根据L298M芯片的原理设计智能巡逻小车驱动模块。L298M的四个输入接口的高低电平控制电机的正转和反转,以及调节占空比来控制电机的转速。
2.2 电路稳压模块
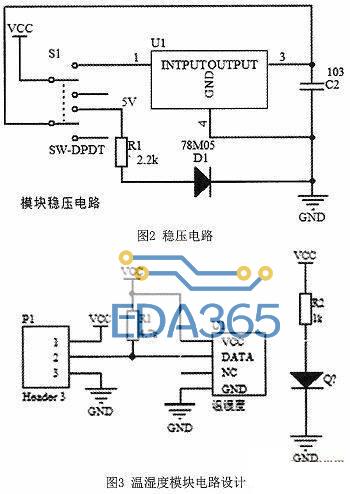
电源管理是智能车设计中的重要环节,它给系统的各个模块进行供电,可靠的电源设计是整个硬件电路稳定运行的基础。为保证电机驱动和最小系统的正常工作,必须得加一个稳压电路,采用的是78M05贴片芯片,基本上能满足89C52单片机和L298N芯片的基本要求。其原理图如图2示。
2.3 温湿度模块
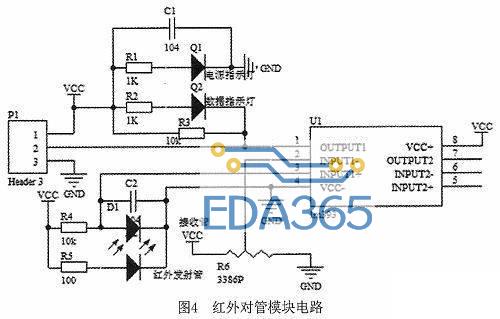
温湿度模块是测量工作环境温度和湿度的模块,通过单片机实时返回数据。其原理图设计如图3示。
2.4 红外对管模块
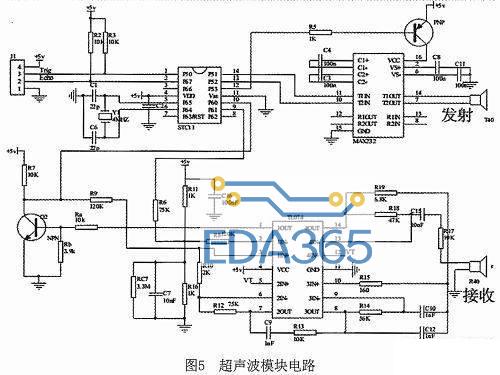
红外对管模块是用于巡逻车切换在寻迹模式下进行工作,当巡逻车在轨迹之外时,可以自己寻找轨迹,当找到轨迹时可以自动进入轨迹,其设计原理图如图4。
2.5 超声波模块
超声波的功能主要分为两个部分,分别是自动测距模块和壁障。用户可以根据想要的功能进行各种模式的切换。切换到自动模式时,超声波主要用于壁障,也可测距,切换为手动模式时,超声波主要用于数据的采集。此模块与单片机实时的进行数据传输和通信。其原理图如图5所示。
3 软件设计
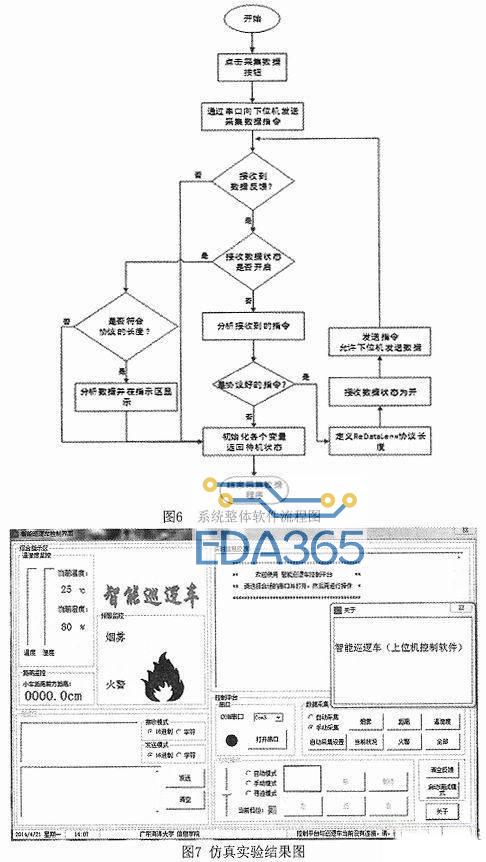
Visusal Basic(VB)是一种可视化的编程语言,具有易学易用的优点,在小型软件设计方面具有较大的优势,本设计采用VB开发上位机作为巡逻车的控制平台,用计算机对车进行数据的采集,该上位机软件能将所有数据动态显示在整屏上,显示小车所在的工作环境并传回周边的环境参数及控制巡逻车的工作。首先初始化模块,选择通信端口,打开串行口,链接成功即上位机进入工作状态,则打开串口程序结束。系统软件数据采集流程图如图6所示,仿真实验结果图如图7所示。
5 结论
本巡逻车基于单片机实现自动、遥控、寻迹模式的切换,并且在三种模式下都能各自进行手动和自动的方式进行距离、温湿度、烟雾火焰等数据的采集,巡逻车能够在特殊环境下代替人完成不能完成的任务,具有采集数据与移动一体的灵活特性。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多






 APP下载
APP下载 登录
登录







