×


在bin文件中,就是一条条的机器指令,每条指令4个字节。
在ADS中打开一个.s文件,选择project->disassemble
可以看到汇编的机器码
汇编代码如下(ADS中的一个例程ARMADSv1_2Examplesasmarmex.s):
AREA ARMex, CODE, READONLY ; name this block of code
ENTRY ; mark first instruction
; to execute
start
MOV r0, #10 ; Set up parameters
MOV r1, #3
ADD r0, r0, r1 ; r0 = r0 + r1
stop
MOV r0, #0x18 ; angel_SWIreason_ReportException
LDR r1, =0x20026 ; ADP_Stopped_ApplicationExit
SWI 0x123456 ; ARM semihosting SWI
END ; Mark end of file
执行project->disassemble后:
** Section #1 'ARMex' (SHT_PROGBITS) [SHF_ALLOC + SHF_EXECINSTR + SHF_ENTRYSECT]
Size : 28 bytes (alignment 4)
start
$a
ARMex
0x00000000: e3a0000a .... MOV r0,#0xa
0x00000004: e3a01003 .... MOV r1,#3
0x00000008: e0800001 .... ADD r0,r0,r1
stop
0x0000000c: e3a00018 .... MOV r0,#0x18
0x00000010: e59f1000 .... LDR r1,0x18
0x00000014: ef123456 V4.. SWI 0x123456
$d
0x00000018: 00020026 &... DCD 131110
使用UltraEdit看bin文件如下:
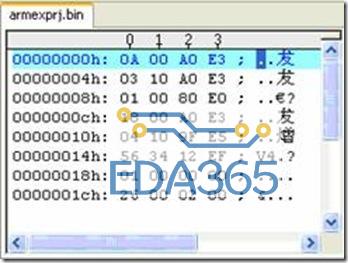
可以看到,与上面的一样。
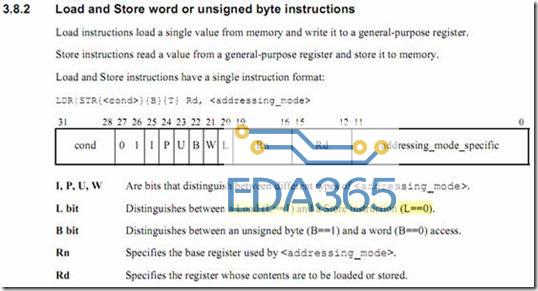
其中MOV的机器码如下(ARM体系结构pdf:p156):
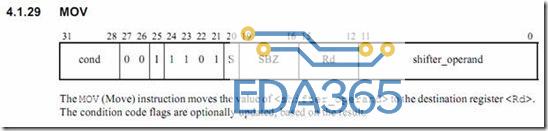
cond,AL(Always)为0b1110
最后有一个131110不知道是什么意思。
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
另一个例子汇编代码如下(ADS中的一个例程ARMADSv1_2Examplesasm subrout.s):
AREA subrout, CODE, READONLY ; name this block of code
ENTRY ; mark first instruction
; to execute
start
MOV r0, #10 ; Set up parameters
MOV r1, #3
BL doadd ; Call subroutine
stop
MOV r0, #0x18 ; angel_SWIreason_ReportException
LDR r1, =0x20026 ; ADP_Stopped_ApplicationExit
SWI 0x123456 ; ARM semihosting SWI
doadd
ADD r0, r0, r1 ; Subroutine code
MOV pc, lr ; Return from subroutine.
END ; Mark end of file
执行project->disassemble后:
** Section #1 'subrout' (SHT_PROGBITS) [SHF_ALLOC + SHF_EXECINSTR + SHF_ENTRYSECT]
Size : 36 bytes (alignment 4)
start
$a
subrout
0x00000000: e3a0000a .... MOV r0,#0xa
0x00000004: e3a01003 .... MOV r1,#3
0x00000008: ebfffffe .... BL doadd ; 0x18
stop
0x0000000c: e3a00018 .... MOV r0,#0x18
0x00000010: e59f1008 .... LDR r1,0x20
0x00000014: ef123456 V4.. SWI 0x123456
doadd
0x00000018: e0800001 .... ADD r0,r0,r1
0x0000001c: e1a0f00e .... MOV pc,r14
$d
0x00000020: 00020026 &... DCD 131110
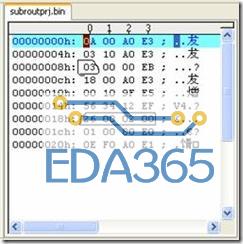
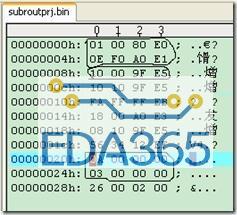
使用UltraEdit看bin文件如下:
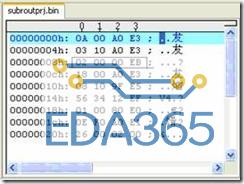
不知道为什么,ADS里面的BL doadd的机器码和bin中的机器码不一样。
BL的机器指令如下:
0x00000008: ebfffffe .... BL doadd ; 0x18
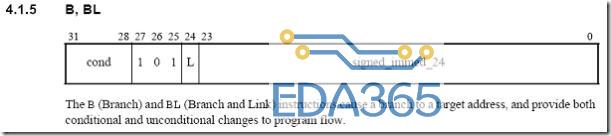
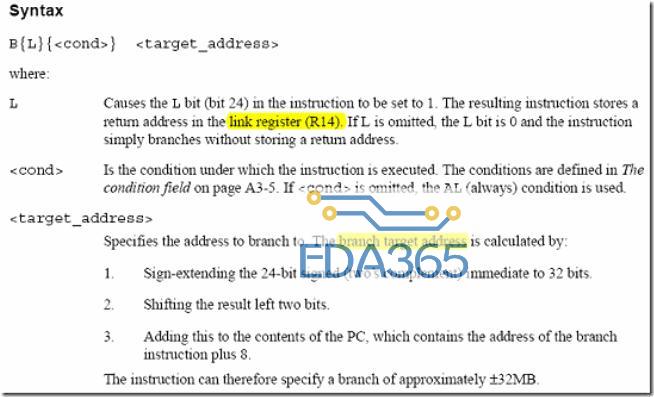
按bin中的机器码,EB000002,1110_1101_0000_0000____0000_0000_0000_0010
会在执行bl指令时的PC后面加上2*4byte,正好跳过3条指令。
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
下面这个例子将doadd写到另一个.s文件中。
subrout.s文件:
AREA subrout, CODE, READONLY ; name this block of code
ENTRY ; mark first instruction
; to execute
IMPORT doadd ; import
start
MOV r0, #10 ; Set up parameters
MOV r1, #3
BL doadd ; Call subroutine
stop
MOV r0, #0x18 ; angel_SWIreason_ReportException
LDR r1, =0x20026 ; ADP_Stopped_ApplicationExit
SWI 0x123456 ; ARM semihosting SWI
END ; Mark end of file
fun.s文件:
AREA subrout, CODE, READONLY ; name this block of code
EXPORT doadd
doadd FUNCTION
ADD r0, r0, r1 ; Subroutine code
MOV pc, lr ; Return from subroutine.
ENDFUNC
LTORG
END
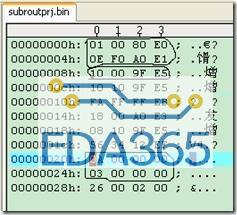
UE查看bin结果:
可以看出,跳转指令变为跳转3个指令,doadd函数放在了bin的最后。
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
这个例子将上面的subrout.s文件改为(工程subroutprj_2F_DCD):
AREA subrout, CODE, READONLY ; name this block of code
ENTRY ; mark first instruction
; to execute
IMPORT doadd ; import
start
LDR r0, Param1 ; Set up parameters
LDR r1, Param2
BL doadd ; Call subroutine
stop
MOV r0, #0x18 ; angel_SWIreason_ReportException
LDR r1, =0x20026 ; ADP_Stopped_ApplicationExit
SWI 0x123456 ; ARM semihosting SWI
Param1 DCD 10
Param2 DCD 3
END ; Mark end of file
MOV只能操作reg和立即数
操作内存,MOV要改为LDR
UE查看bin为:
LDR r0, Param1的机器码为:
E59F0010=0111_0101_1001_1111_0000_0000_0001_0000
Rn为R15=PC,Rd=R0,address=16(4*Instruction)+PC
输出的Image Symbol Table为:
================================================================================
Image Symbol Table
Mapping Symbols
Sym Value Execution Region
$a 0x00000000 ER_RO
$d 0x00000020 ER_RO
其中$a表示ARM Code,$d表示Data
这是整个bin文件的区域分配,从0开始为ARM Code,然后从20开始为Data,其中ARM Code是fun section和subrout section合在一起的,Data也是两个数据合在一起的(似乎是armlink把input section中同一属性的段合并到output section中)。
ADS中输出调试信息 Image Map
Image Map
Symbol
Section cross-reference
在list file中choose一个文件,比如boot270.txt,可以把信息输出到txt中
下面这个输出是subroutprj_2F_DCD的输出,在arm反汇编.doc里。
================================================================================
Image Symbol Table
Mapping Symbols
Sym Value Execution Region
$a 0x00000000 ER_RO
$d 0x00000020 ER_RO
Local Symbols
Symbol Name Value Ov Type Size Object(Section)
E:dsparmpxa270projectsubroutprj_2F_DCDsubrout.s 0x00000000 Number 0 subrout.o ABSOLUTE
0x00000000 Data 16 subrout.o(.debug_abbrev)
0x00000000 Data 128 subrout.o(.debug_info)
0x00000000 Data 108 subrout.o(.debug_line)
subrout 0x00000008 ARM Code 36 subrout.o(subrout)
start 0x00000008 ARM Code 0 subrout.o(subrout)
stop 0x00000014 ARM Code 0 subrout.o(subrout)
Param1 0x00000020 Data 4 subrout.o(subrout)
Param2 0x00000024 Data 4 subrout.o(subrout)
E:dsparmpxa270projectsubroutprj_2F_DCDfun.s 0x00000000 Number 0 fun.o ABSOLUTE
0x00000000 Data 60 fun.o(.debug_frame)
0x00000010 Data 16 fun.o(.debug_abbrev)
fun 0x00000000 ARM Code 8 fun.o(fun)
0x0000006c Data 96 fun.o(.debug_line)
0x00000080 Data 124 fun.o(.debug_info)
Global Symbols
Symbol Name Value Ov Type Size Object(Section)
BuildAttributes$$ARM_ISAv4$M$PE$A:L22$X:L11$S22$~IW$~STKCKD$~SHL$OSPACE 0x00000000 Number 0 anon$$obj.o ABSOLUTE
doadd 0x00000000 ARM Code 8 fun.o(fun)
UE查看bin结果

从bin看到,doadd两条指令放在了bin的最前面,这样
start的值value为0x00000008
fun的值value为0x00000000
start和fun都是ARM Code,是代码的标号label,标号的值代表一个地址,所以start和fun在bin中的地址即为它们的值。
Image Symbol Table中包含两部分,Local Symbol和Global Symbol,前者在只能在定义的文件中引用,后者可以在整个工程中引用。在这个工程中后者只有doadd函数。
========================================================================
Memory Map of the image
Image Entry point : 0x00000000
Load Region LR_1 (Base: 0x00000000, Size: 0x0000002c, Max: 0xffffffff, ABSOLUTE)
Execution Region ER_RO (Base: 0x00000000, Size: 0x0000002c, Max: 0xffffffff, ABSOLUTE)
Base Addr Size Type Attr Idx E Section Name Object
0x00000000 0x00000008 Code RO 5 * fun fun.o
0x00000008 0x00000024 Code RO 1 * subrout subrout.o
Execution Region ER_RW (Base: 0x0000002c, Size: 0x00000000, Max: 0xffffffff, ABSOLUTE)
**** No section assigned to this execution region ****
Execution Region ER_ZI (Base: 0x0000002c, Size: 0x00000000, Max: 0xffffffff, ABSOLUTE)
**** No section assigned to this execution region ****
Image Entry point : 0x00000000这句话有点问题??!!
Base Addr Size Type Attr Idx E Section Name Object
0x00000000 0x00000008 Code RO 5 * fun fun.o
0x00000008 0x00000024 Code RO 1 * subrout subrout.o
上面这些说明了各段的基地址,长度,类型(code,data),属性(RO,RW),段名,存在的目标文件。
在这里fun放在了subrout的前面,由于armlinker在链接input section的时候排序sort是有规则的,先同一属性(RO,RW,RI),然后按名字的字母表顺序。由于fun和subrout都是RO,所以按名字fun在前面。
-----------------------------------------------------------------
下面以boot270工程为例子分析:
输出的Image Symbol Table
Global Symbols
Symbol Name Value Ov Type Size Object(Section)
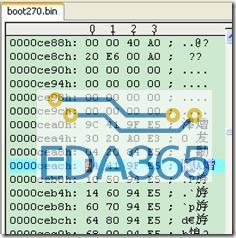
xlli_read_SCR 0xa000cea0 ARM Code 420 xlli_LowLev_Init.o(text)
可以看出xlli_read_SCR为ARM Code,是一个标号label,值即为其在bin中的地址,由于设置RO Base为0xA0000000,所以在bin中找0x0000cea0处的指令:
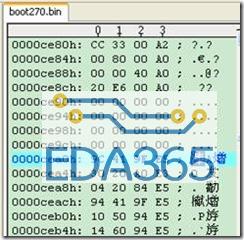
指令为E59F_419C,即为
xlli_read_SCR FUNCTION
;
; Insure the RDH and PH bits on PXA27x must be clear to enable GPIO pins.
; They are sticky bits so they must be set to clear them.
;
ldr r4, =xlli_PMRCREGS_PHYSICAL_BASE
该指令表示(E表示AL,无条件,F为R15=PC,4表示放到R4里,地址为PC+19C=D03C,再加2*4为D044)
0x0000d044处的数据为40F00000,与代码中的数据吻合:
; POWER MANAGER base address and register offsets from the base address
;
xlli_PMRCREGS_PHYSICAL_BASE EQU 0x40F00000
这个数据在Image Symbol Table中也能找到,在Local Symbols中:
xlli_PMRCREGS_PHYSICAL_BASE 0x40f00000 Number 0 main_Flash.o ABSOLUTE
能看到是一个Number,值value为0x40f00000。
这个数据的地址在Image Symbol Table中也能看到:
Mapping Symbols
Sym Value Execution Region
$d 0xa000d044 ER_RO
$d表示数据data。
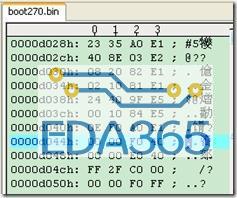
下一条指令:
; Get, and save the present GPIO settings for direction registers 0, 1 and 2
;
ldr r4, =xlli_GPIOREGS_PHYSICAL_BASE ; Get the GPIO registers base address
指令为:E5_9F_4_194
数据的地址为:PC+194+2*4=D048
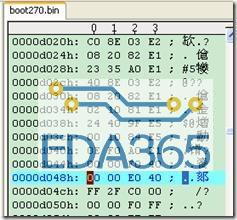
数据为:40E0 0000,与代码中的定义对应:
; GENERAL PURPOSE I/O (GPIO) base address and register offsets from the base address
;
xlli_GPIOREGS_PHYSICAL_BASE EQU 0x40E00000
地址0x0000 D048在Image Symbol Table中没有,不过有:
Mapping Symbols
Sym Value Execution Region
$d 0xa000d044 ER_RO
说明从0xa000d044处开始为许多RO data
上面的工程只有RO,怎么
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

----时钟配置.例程分析") 浅谈msp430f5529入门(2)----时钟配置.例程分析
浅谈msp430f5529入门(2)----时钟配置.例程分析





 APP下载
APP下载 登录
登录







