×


舵机控制原理:
提供周期为20ms的pwm信号,调节pwm的占空比为0.5ms-2.5ms可使舵机从0-180度线性变化
舵机控制程序:
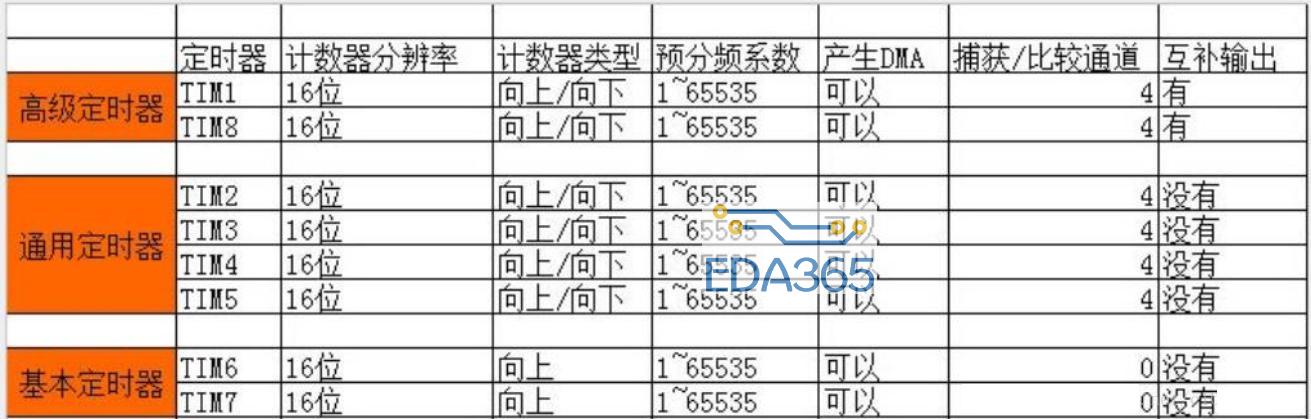
首先我们要利用stm32定时器产生合适周期的pwm输出信号,这里使用的是PWM高级定时器1的CH1(即PA8),可以通过配置输入参数arr和psc产生合适的频率的pwm脉冲信号。
//高级定时器1pwm输出初始化
//arr:自动重装值(周期) psc:时钟预分频数
void tim1_pwmInit(uint16_t arr, uint16_t psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); // 使能定时器1的外设时钟
RCC_APB2PeriphClockCmd(TIM1_CH1_GPIO_CLK, ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = TIM1_CH1_PIN; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TIM1_CH1_PORT, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
//TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性低
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
在有了pwm信号源之后我们便可以根据舵机的控制原理构建舵机驱动函数了。
// 72M / (719 + 1) = 0.1M 故记一个数的时间为10us 定时周期:(1999 + 1) * 10us = 20ms
#define SERVO_TIM_ARR 1999
#define SERVO_TIM_PSC 719
void servo_init(void)
{
tim1_pwmInit(SERVO_TIM_ARR,SERVO_TIM_PSC);
TIM_SetCompare1(TIM1,150); //使舵机恢复到中间位置
}
//0.5ms--0° 2.5ms--180°
void servo_angle(uint16_t angle)
{
uint16_t pulse;
//针对舵机可转角度限辐
if(angle <= 5)
angle = 5;
if(angle >= 175)
angle = 175;
//将角度值转换为脉冲值
pulse = (uint16_t)(50 + angle * 100/90.0); //此转换公式需根据pwm的arr及psc配置来做相应变化
TIM_SetCompare1(TIM1, pulse);
}
void servo_debug(void)
{
uint8_t i;
for(i = 0; i < 10; ++i)
{
delay_ms(500);
servo_angle(45);
delay_ms(500);
servo_angle(90);
delay_ms(500);
servo_angle(135);
delay_ms(500);
servo_angle(90);
}
}
在主函数中初始化舵机驱动后,便可以调用servo_angle(uint16_t angle)函数实现舵机在5-175度之间任意角度的旋转,选择5-175度限辐是为了保护舵机(防止舵机处于打死的状态),也可改为0-180度。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 qemu+chroot构建arm aarch64虚拟机
qemu+chroot构建arm aarch64虚拟机







 APP下载
APP下载 登录
登录







