APP下载
APP下载 登录
登录







作者:Evan 远远,魔都漂流的孤独患者。热爱电力电子和模拟电路,希望大家一起交流。
在上两期的讨论中,我们说到了 COT 的基本特性和稳定性。有朋友问到,COT 和滞环控制相比究竟有何优势?因此先把纹波补偿这个问题再放一放,本期将把第一期未说明的一些细节问题做进一步的讨论。
滞环控制的一大缺点就是开关频率会随着不同的系统参数受到影响,而 COT 可以通过一些改进使得“开关频率保持不变”。这种改进的控制方法被称为自适应恒定导通时间模式(adaptive constant on time, ACOT)。
当 Buck 变换器处在 CCM 时,必有
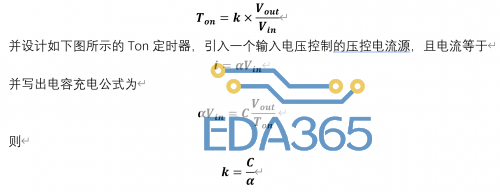
Ton 是恒定的导通时间,开关频率仅与输入电压和输出电压有关系,开关频率与输入电压成反比关系,与输出电压成正比关系。如果我们让恒定的导通时间 Ton 与 Vin 成反比,而与输出电压 Vout 成正比,就可以抵消 Vout 和 Vin 的影响,从而使得开关频率近似于保持不变。

图 7ACOT 和 COT 在输入电压变化时的开关频率变化对比
具体是怎么实现的呢?我们引入一个 k 值,使得 Ton 满足下列式子,就可以保证。
这种定时器非常易于实现。
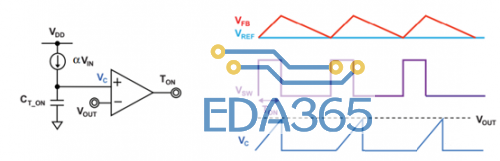
图 8 ACOT 基础的定时器架构
当 Buck 变换器处在 DCM 时,可以根据能量守恒原则,推算开关频率的表达式。忽略变换器的损耗,输入电压则输入能量为
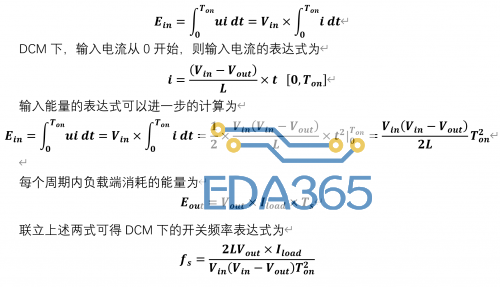
可以看出,开关频率与负载电流成正比,负载电流越小时,开关频率也越小,这意味着轻载下,开关损耗也会大大的减小,无疑提升了轻载工况下的效率。
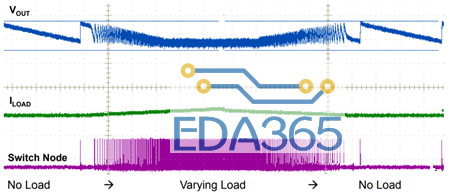
图 8 COT 模式 DCM-CCM 无缝切换
这绝对是 COT 控制模式的一大优势,并且 DCM 和 CCM 可以无缝切换,而不必像一些混合模式芯片,轻载进入 Burst Mode 或者 Pulse Skipping 工作模式,需要做内部逻辑切换。我们还可以把 DCM 下的开关频率表达式写成比较统一的形式。
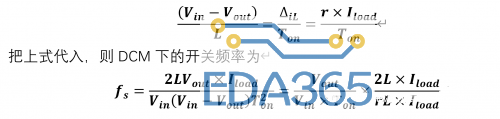
根据这个表达式可以看的更清楚,DCM 下,电感电流纹波率 r>2,开关频率必然小于 CCM 下的开关频率,也可以解释为什么 COT 模式可以做到无缝切换,因为 r 的变化是连续的。
下一期,我们先说下关于 COT 控制模式另一个重要议题——开关节点的边沿抖动 jitter。








 热门文章
热门文章