
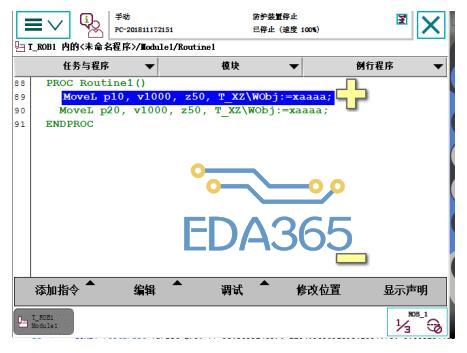
如果需要将ABB工业机器人移动到某个已知的位置点时,操作步骤一般是建立一个程序,然后在程序里面编写一条运动语句,然后运行该程序将机器人移动到已知的位置点(如下图);
将机器人移动到“p10”位置点;
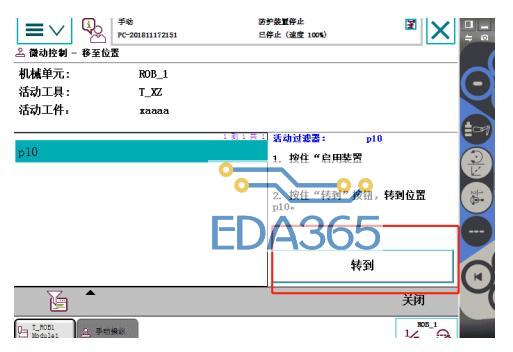
在ABB机器人的操作中有一个方法可以将机器人快速移动到已知的位置点,操作方法如下:
1)将机器人示教器界面切换到手动操作界面,点击“转到”;

2)通过过滤按钮搜索到要移动到的位置点“p10”:
3)选中要移动的位置点“p10”,一直按住“使能键”,然后一直点住“转到”按钮,机器人就可以运动到“p10”位置点。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 采用STC12C5410AD处理器实现自动割草机器人主控系统的设计
采用STC12C5410AD处理器实现自动割草机器人主控系统的设计






 APP下载
APP下载 登录
登录







