×


针对机器人主动柔顺控制在工程中如何实现的问题,开发了一种开放式机器人控制器。此控制器采用“PC+PMAC”的控制结构,利用伺服驱动器的两种不同的控制模式,提出了一种实用的力/位混合控制方案,给出了相应的硬件和软件的具体实现。实验表明,文章提出的力/位混合控制方法具有良好的稳定性和力控制精度。
随着机器人在各个领域应用的日益广泛,许多场合要求机器人具有力控制的能力。例如,机器人的精密装配、修刮或工件表面磨削、抛光和擦洗等。在操作过程中要求保持其末端执行器与环境接触。完成这些作业任务,必须具备从自由空问到约束空问的对力的柔顺控制能力。
柔顺控制分为主动柔顺控制和被动柔顺性控制。被动柔顺控制由于其专业性强,成功率低等不足使应用范围受到限制。为了克服其不足,需要对机器人采用主动柔顺控制,即力控制。本系统采用基于PC总线的开放式机器人控制器,具体以PC+DSP运动控制卡的结构来构造特种机器人开放式的硬件平台,以满足机器人在完成接触性作业时力控制的需要。
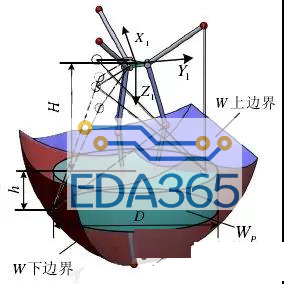
针对特殊接触性作业,本系统中的机器人是平面三自由度操作手,整个操作手有一个移动副,两个转动副。适用于在回转壳体内或外壁表面卜完成某些接触性作业,如在壳体内完成清理污垢或打磨表面等。其中,整个操作手由三个伺服电机驱动,回转壳体由一个伺服电机驱动,共四个伺服电机。
3.1 开放式机器人控制器的实现模式
控制系统以:I:业控制计算机(IPC)为上位机,以插接在IPC主板ISA扩展槽内的DSP控制卡为系统的控制核心。此种IPC+PMAC双CPU的控制模式具有实现方便、功能强大、可靠性高等特点,是一种开放式的控制系统。整个控制器采用了模块化的体系结构,工业PC机处理非实时的部分,实时的运动控制由DSP运动控制卡来承担。
控制系统采用的DSP运动控制器为Delta Tan公司的I型PMAC八轴运动控制卡。PMAC从硬件和软件上都体现了优秀的开放性能和强大的运动控制能力。PMAC卡较一般运动控制器有很强的处理能力、轨迹特性和输入带宽,并且有较强的灵活性,能适用于多总线结构(PC、STD、VME)。
其具体的功能包括:多轴插补计算、用户辅助PLC编程以及模拟量数据采集处理。本系统中PMAC控制卡的硬件核心为Mo.tomla的DSP56003数字信号处理芯片,伺服周期单轴为55Vs,可接收来自测速发电机、光电编码盘、光栅、旋转变压器的多种反馈信号,能与多种伺服电机兼容。PMAC控制卡的优良特性为实现专用机器人力控制提供了良好的硬件平台。
1.大臂2.小臂3.执行机构(可绕X轴旋转)4.不规则的内壁表面5.回转壳体
本系统应用的I型PMAC,有j1一J8不同功能的外部接口,可控制1~8轴。本系统中用到了四个接口,J3(多路拨码开关I/0)一与ACC一34AA(PMAC的附件)连接;J5(通用数字输入和输出)一控制光耦和中间继电器;J7(模拟输出5—8轴)一控制执行机构和驱动回转壳体;J8(模拟输出1—4轴)一控制大臂和小臂电机。
3.2 胶片粘贴机器人的硬件平台
本系统采用工控机IPC、PMAC I型8轴运动控制卡、双端口RAM(DPRAM)、I/O扩展板ACC一34AA、松下、安川伺服电机及驱动器共四套,用于它们之间控制的接口连接板一块。其控制系统构成图2所示,本系统自行开发的接口连接板如图3所示。
在控制系统中,用到了PMAC的两个附件:
①DPRAM(Dual port RAM):双端口RAM
②ACC一34AA:多路I/O驱动板
其中,DPRAM作为PMAC的附件,是IPC和PMAC之间的通讯桥梁。DPRAM为主机和PMAC之间可以共享高速内存区,通过DPRAM,1PC与PMAC之问可以方便地进行无握手数据交换。DPRAM在主机(IPC)和PMAC之间有地址映射,用这个地址映射匹配两边的内存地II:、DPRAM对数据实时性的保证,提高了控制系统的灵敏性,使操作手实施主动柔顺控制时力误差减少,力控制精度大大增加。DPRAM与IPC、PMAC的关系见图4。
图3接线连接板外形图
图4 DPRAM连接简图
ACC一34AA也是PMAC的附件之一,可以提供64个光隔离的分立I/()点,以32位字分组,有32个输入点和32个输出点。输入点可以接收外部输入控制信号,以便卜位控制器(PMAC)作出决策。比如,在本系统中接受控制面板l:的输入控制信号。
PMAC运行后臼PIc程序,通过M变量对ACC一34AA输入端和输出端进行只读和只写。
4.1力控制的必要性
为使机器人在约束环境中具有灵活性,同时避免与环境接触时产生过大的接触力或力矩,这就要求机器人终端具备同时控制其终端位置和力的能力。本系统中,机器人操作手要在工作空间狭小的回转壳体内完成预定的接触性作业,此项作业要求执行机构要在壳体内壁上定位精确,同时能够在不规则的回转壳体内壁表面上不同区域始终保持接触,且接触力的大小恒定或按规定输出。因此,本文在位置伺服系统的基础上考虑力控制,以使操作手获得对未知环境的柔顺性。
4.2 基于PMAC力/位混合控制的硬件实现
为了实现机器人末端的力/位混合控制,需要PMAc的模拟输出分别工作在伺服驱动器的速度和转矩控制模式下,见图6所示。
图6伺服驱动器输出模式
驱动器的速度模式和力矩模式都接受上位控制器(PMAC)的模拟信号。其中,速度模式的是以控制位置为主要控制指标,而力矩模式是以控制转矩为主要控制指标,在力矩模式下可以在额定转矩范匿内实现恒转矩输出。
为了实现以上要求,操作手的接触作业分三个步骤:首先操作手在速度模式下到达预定的位置并保持一定的姿态,在这种模式下利用电流环的位置控制更准确;随后,对伺服电机进行模式转换,小臂在力矩模式下竖直抬起,在执行机构接近壳体时,执行机构的电机处于自由状态以保证能良好的依附于壳体内壁;最后,在末端机构与壳体内壁接触时,壳体转动,依靠反馈信息调节小臂伺服电机的转矩使执行器能够始终与壳体保持接触并控制一定的接触力,从而使机器人能够在非结构表面下进行有效的力控制,完成接触性作业。
本系统中PMAC运动控制器共控制四轴联动,但由于操作手中大臂、小臂、执行机构要分别工作于两种不同模式下,所以实际占用PMAC的轴通道数为7个。在这两种模式下,驱动器侧接受控制器指令的输入引脚不同,以松下驱动器为例,速度模式下用14、15引脚,而在力矩模式下用16、17引脚。本系统中PMAC与驱动器模式转换的双通道连接见图7。
图7双轴通道伺服输出连接图
图7所示两个轴通道DACl一DAC2(PMAC的43、44)模拟输出分别接到伺服驱动器的速度和转矩指令引脚(驱动器侧的14、16)。轴通道1(DACl)的辅助连接是指与其有关的反馈、驱动器使能和报错、限位等连接。,如,CHAl一CHCl是通道1的编码盘反馈信号,+LIMI和一LIMl是在反方向和正方向的限位信号,AENAI/D1RI是放大器使能信号,决定伺服驱动器的使能,其它类似引脚不在详述。、PMAC的J8有60个引脚,有四个轴输出{通道,每个轴输出通道都有一套类似的辅助连接,每个轴输出通道根据其相应的辅助连接而凋节模拟输出,完成伺服功能。在驱动器一侧,要实现两种模式,需要轴输出通道的模拟指令信号在14和16之间切换,如果用一个轴输出通道,需要在PMAC和驱动器之间自己搭建电路在外部来完成此切换,这样做实时性不好,可靠性也不高。,因此本系统采用PMAC的两个轴通道来实现埘驱动器两种模式的伺服输出,这样做可以不必搭建外部电路,而11保证实时性的要求。具体做法是通过PMAC的J5 1来改变C—MODE的状态。如果单独控制两个轴通道时,需要两套辅助连接以保证轴通道的伺服输出,但实际上一个驱动器及外部开关只能提供一套轴通道辅助连接,这需要PMAC在其内部完成输出的切换,通过设置I变量中的IX0217 J,这种切换保证在只有一套轴辅助连接的前提下,PMAC对两个轴通道伺服输出。
4.3 基于PMAC力/位控制的软件实现
整个控制软件包括实时控制软件与上位机的系统管理软件两部分。实时控制软件包括伺服驱动、PLC监控、数据采集等;系统管理软件包括初始化、参数输入、双CPU通讯、壳体作业规划等。为了在PMA(:中实现操作手的力/位混合控制,控制软件在Windows平台L用VC++6.0编写系统应用程序,同时调用PMAC中PCOMM32PRO动态连接库中的函数完成对PMAC的实时操作。、
其中,Pl为壳体入口处位置的横坐标,P2为壳体作业位置的横坐标,P3为壳体作业位置的纵坐标,P】00为力矩设置值。/102为电机指令输出地址,1169为小臂电机DAC输出限制,c为标定小臂角度极限。M162为寄存器中存储小臂电机(电机1)实际位置值。M168为输出力矩对DAC的标定值。
控制流程如图8所示。
本文针对要完成接触性作业的特种机器人,研究了一个实用的开放式的机器人控制器。应用IPC和PMAC双CPU的开放式结构,实现了两个级别的开放度,获得了较好的人机交互能力,并在基础上,对机器人进行有效的力/位混合控制,给出了具体控制的硬件和软件实现,此系统能够使机器人在非结构表面上完成接触性操作。该系统在用于非规则壳体内壁表面的贴片作业中已取得了良好的控制效果。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 采用PC/104总线和CAN总线实现对力信息实时采集和传送的系统设计
采用PC/104总线和CAN总线实现对力信息实时采集和传送的系统设计







 APP下载
APP下载 登录
登录







