×


转圈圈的扫地机器人并不能算做是机器人,只能算是执行某种固定程序的机械。
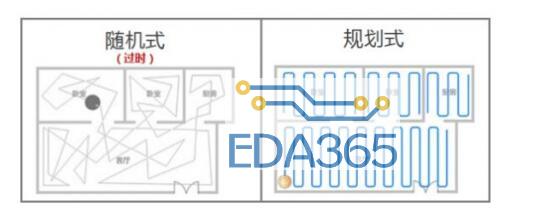
Roomba是最早流行的扫地机器人,它的路径规划是随机碰撞模式,依据的是红外传感器和高精度的程序算法,虽然算法足够精确,但它就在屋里撞来撞去,效率不是很高,看起来也很笨。
于是,后起之秀们纷纷推出自己的路径规划模式,现在有这么几种:
Neato扫地机器人是通过激光测距的方法生成室内地图,在此基础上合理地规划清扫路线,而不是试探着撞来撞去,用户直观的感受是,它看起来比较聪明。其实现原理是:它的顶端设置有一个可旋转的激光发射头和配套接收器,通过发射激光扫描自身到边界每个点的距离,从而生成数字地图,还能根据屋内家具位置的变化实时进行更新。
既然大脑中有了室内地图,Neato还可以聪明地记忆存储位置关系,比如当它因电量不足而自动返回充电完毕以后,能自动从上次返回的节点继续开始清扫。
这才是智能的应有之义。
类似于室内GPS定位的方法,北极星导航系统的实现原理是在室内建立一个发射信号的模块,机器人通过测算自身跟该信号的偏移角度来确定自己的位置。由于它不能像Neato一样“看见”室内的物体,所以只能在清扫过程中通过自身去触碰来建立室内地图和物体之间的位置关系。
北极星导航系统是美国Evolution Robotics公司的专利,最早应用于其擦地机器人Mint产品上,2012年9月公司被iRobot收购,随后应用于Braava系列擦地机器人。
英国Dyson公司去年推出一款扫地机器人360Eye,不过目前还未正式销售。它利用顶部搭载的3摄像头扫描周围的环境,然后结合红外传感器,利用数学运算和几何、三角法测绘出房间的地图,以此来进行导航,并根据前后影像中各个地标的位置变化来判断当前的移动路线,并对其所构建的环境模型进行更新与调整。
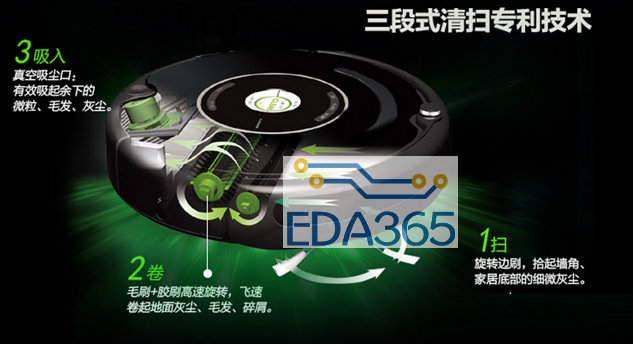
扫地机器人其实就是智能吸尘器,它是一个在地上自动行走的小车,边走边进行清扫(吸尘)。一般,它底部前面一个万向轮,左右各自一个独立驱动的行走轮,有风机(吸尘器),由可充电电池供电,直流电机驱动。也有带拖布的,有的还带水箱。不带水箱的用湿拖布,一次(不换)可用约30平米,而带水箱的水也差不多管约30平米,相当,其实,经常拖,中途不换拖布也行,更何况,带水箱的也有另一个小问题——一旦机器卡住又一直渗水,木地板就麻烦了,所以,个人认为不带水箱并不是问题。它应该把该扫的地方都扫到,同时应能扫干净,所以吸力和路径规划就至关重要了,当然,如带拖布,则可适当降低对吸力的要求。
如何识别室内情况并规划路线
规划路线的原则:
首先,清扫路径越简单越好;
其次,要能遍历所有开放的空间(清扫所有的地方);
第三,重复率要低,一般情况下,同一地方不要多次清扫;
第四,对于比较脏的地方,应该适当多次清扫;

第五,完成清扫时间越少越好。所以,要实现这些,手段就是,需要传感器和算法的结合,由于居家环境各有不同,要达到人们普遍要求的这些,其实并不容易,必须有一部分人工智能在里面。比如在黑暗或者强光环境,或者地板颜色既有很深又有很浅的环境,都对扫地机器人的传感器检测和判断造成很大的干扰,举个例子,在黑暗环境中,靠摄像头及图像处理技术进行环境判断的就会失效;地板的深浅,对于防跌落的传感器信号判断又带来一个很大的问题,因为目前扫地机器人的防跌落技术基本上都是用向下发射红外光检测其反射信号,根据反射的强弱来判断是否下面就是悬空,浅色反射很强,深色反射很弱,下面有高悬空则基本上没有反射,如何设置一个值来界定下面是悬空,这就很难这些问题能不能解决?
理论上都没问题,用复合传感器,但是,需要增加成本和安装空间。目前,为了实现导航和规划,主要有:激光测距、摄像处理、北极星定位和巡岸导航等技术,但即便使用激光测距导航,依旧需要算法支持以实现规划。市面上单纯的弓形清扫机器人不算真正的规划,因为它只是向前行走,碰上障碍就转90度行走一个小的距离(一般不超过机器自身宽度),再在同一方向转90度后行走,直至碰上障碍,又向反旋转一个90度行走一个小的距离,再继续旋转90度后行走,直至碰上障碍物一直这样循环,会有很多漏扫。像美国Neato、国产小米用和国产科沃斯的DR95就是激光导航,韩国三星用的是摄像头及图像处理,国产的艾亿佳用的是自己的发明专利技术巡岸导航。
而纯粹的陀螺仪,它能实现定向,本身并不能实现导航,除非配以其他导航手段或者算法。关于清扫路径的优化及算法(策略),有很多文章和专利,请搜索查询一下,可资参考,在此基础上,您也可以进行改进、完善和创新。另外,随机式的不能保证全覆盖,脱困也较不容易,重复率高,不建议采用。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 智能机器人的三大关键技术详解
智能机器人的三大关键技术详解







 APP下载
APP下载 登录
登录







