×


唇膏的自动化装配和检测中,在手机电池的自动化测量中,在药品等的自动化包装和贴标,给数控机床上下料,在粉末压铸行业,在各种仪表的分类,装配和检测等涉及到大量小零件的搬运工作。在这类应用中的一个特点就是零件小,数量大,表面要求高。为此人门设计小型拖盘专门装特定的零件,一次装的数量大,零件间严格分开,便于运输。随具体应用不同这类机器人的结构也差异很大,但原理几乎相同,所有本文以德国Berger Lahr公司的RMS 600为例来介绍这类供料机构。
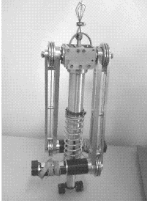
图1给出了一个标准的批量供货机构原来图,它由拖盘摞升降部分,拖盘水平运动部分和一个二维XZ机器手组成。图1的例子中拖盘摞升降部分共有八个拖盘,由直线运动单元带动上下任意精确运动。工作时把最顶部第一个拖盘升高到比水平运动轴高出一定高度后停止,然后水平轴向第一个托盘运动,使所带的拖板处于第一个拖盘下面。然后升降轴下降使第一个拖盘处于水平轴的拖板上。然后升降轴升高10mm, 接着水平轴向回运动把该托盘带到二维XZ机器手前面。XZ二维机器手先逐个搬运第一排的零件,搬运后处理完再放回原处。当一排零件被处理完后,水平运动轴再向前运动使第二排的零件处于机器手可以抓取的位置上。如此类推值得处理完最后一排的零件后,水平运动轴再把该托盘送回到升降轴的原来位置。然后处理下一个托盘的零件,如此进行下去,直到处理完最后一个托盘上的全部零件。
图 1: 原理性结构示意图 图2: 为nanometer制做的大批量零件处理上料机构
图2所示的供料系统一次最多有8个托盘。每个托盘的尺寸是600*400mm,托盘及里面的零件最大重量小于15公斤。每交换一次托盘用时5秒,每个运动部分的重服定位精度为0.1mm。
升降轴采用两根PAS44BB组成的龙门式结构,最大负重可达400公斤。水平运动轴采用两根PAS42BB,最大负重可达80公斤。XZ二维机器人的X轴采用PAS42BB,而Z轴采用LM-A41BB。运动速度高达60米/分钟。手爪为吸盘,一次抓住两个零件。
各个轴所配的行星减速机是德国Neugart公司的PLE系列精密行星减速机。整个系统采用4个PLE系列精密行星减速机和4个可编程,带运动控制功能的智能伺服驱动器系统,各个运动轴及运动位置通过传感器和智能驱动器运动到位输出信号来保证各个运动轴的运动距离和运动时序。请与沈阳莱茵机电有限公司丛经理联系,13897962353.
1) 托盘的数量最多可达18个,
2) 托盘的尺寸可以可以按需定制,
3) 托盘里零件的放置处类同工装,零件平稳,还可以换零件工装来完成其他零件的搬运,
4) 可以采用气动手爪,电动手爪,吸盘等来优化零件的抓取和放回,
5) 整个系统体积小:长*宽*高为1500*1270*2150mm,
6) 具有一定的通用性,通过输入不同的参数就可以完成其它相似零件的抓取,
7) 由于托盘较小,水平轴也可以一次搬运两个托盘。
通过上面对供料机器人的结构和工作过程的介绍,相信大家已经发现由直角坐标机器人组成的上料下料,搬运机器人非常适很多种应用,而且比其它的机器人成本低,效率高,在欧洲被广泛应用于化妆品,食品,手机,传感器,玩具,仪表等生产中。上面仅仅一种结构形式的上料下料机器人,我们还有10多种其他结构的上下料机器人,百格拉公司二十年来生产了数千台套类似的机器人,详细资料请与沈阳莱茵机电有限公司的丛大蔚联系。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 浅析工业机器人的基本组成结构
浅析工业机器人的基本组成结构







 APP下载
APP下载 登录
登录







