APP下载
APP下载 登录
登录







随着社会的快速发展和商业化进程的加速,越来越多的行业和部门需要掌握车辆或其它移动目标的实时信息并能远程控制目标。这类需求使得车辆数据远传控制系统逐渐成为国内外的研究热点。车辆数据远传控制系统通过站点终端及时将车辆信息及行车信息发送到调度站,并实时显示车辆及道路信息,将实现科学合理调度车辆,减少乘客出行不便,并可传递辅助驾驶或避免事故的实时信息,或提供娱乐信息、生活信息等数据服务。
1 车载数据远传控制系统的设计与实现
1.1 系统总体设计
车载远传控制系统主要包括两部分:智能车模型和远传控制系统。
智能车模型主要由MC9S12核心控制模块、道路检测模块、舵机转向模块、速度检测模块、电机驱动模块等组成。智能车模型通过道路检测模块来识别道路信息,通过AD转化信息传给核心控制模块,然后由核心控制模块分析处理,采用PID的控制方式来驱动舵机转向模块和电机,从而实现自动寻路行驶。
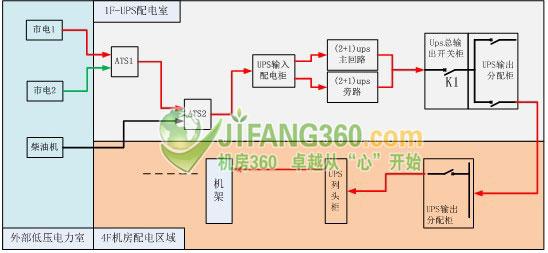
远传控制系统由两块MC9S12单片机构成主从式结构。中间通过无线收发模块NRF24L01实现车辆数据及控制命令的远程传输。系统工作时首先由主机发送命令给从机,然后从机与智能车模型上的单片机采用并行口通信的方式传达主机的命令,同时将模型车此时运行的速度、位置、舵机、电机等参数回传给主机。如此循环下去,在一个时间周期内实现“主到从,从到主”之间的双向通信,从而既能接受智能车的数据又能控制智能车。远传控制系统结构框图如图1所示。
1.2 系统硬件设计
远传控制系统的电路模块,主要有MC9S12单片机最小系统、电源模块、电机驱动模块、NRF14L01模块等。
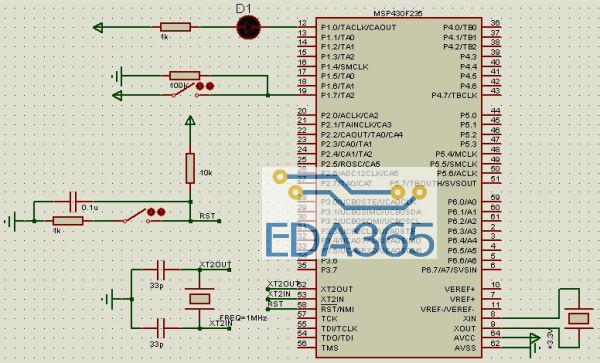
1.2.1 MC9S12单片机最小系统
MC9S12XS128只是HCS12X家族中的一个成员。该器件包括大量的片上处理器和外部I/O。MC9S12XS128是一个16位器件,有16位中央处理单元(128KB Flash)、128 kBFlash、8 kB RAM、2 kB EEPROM组成片内存储器。同时还包括2个异步串行通讯接口(SCI)、2个串行外设接口(SPI)和一个8通道输入捕捉/输出比较(IC/OC)增强型捕捉定时器(ECT)、1个16通道10位A/D转换器(ADC)和一个8通道PWM。图2为MC9S12XS 128的112封装引脚图。








 热门文章
热门文章