APP下载
APP下载 登录
登录







M48,8MHz
9600,1,8,1
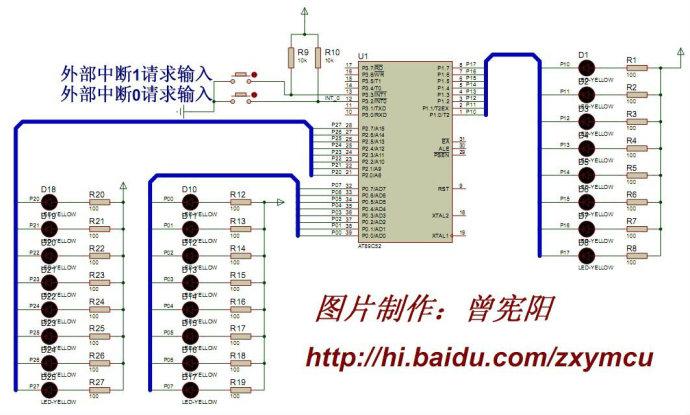
输出:用定时器控制普通IO口输出位
输入:用外部中断+定时器,判断位的宽度
好几天没休息,利用闲暇写的,也没找到别人的参考程序,不过终于算是稳定了,其实还应该有很多其它的方法可以试一下,比如用PWM输出串行数据,用输入捕获接收数据,或定时查询,或用任意一个IO口中断,则每个引脚都有可能
现在还有些问题,全双工同时收发时发送偶尔出错,占用两个定时器有些浪费,以后再修改吧,最好加上各种波率
本程序为直接摘出部分,删了无关的部分,在此可能有些变量没用,或有段落遗漏,请谅
#include
#include
#include
#include
#defineSbit1()PORTD|=1
volatileunsignedint
eep_ms,//毫秒计时
keytime,//等待时间
SoundOnTime;////
volatileunsignedchar
rdata,
key,
start=0,
keycode,//
*TxPoint,
rtime,
INT0_time,//中断次数
RxLength=0,//接收长度
RUDR,//摸拟串口接收的数据
TxLength,//串口发送数据长度
SUDR;//串口发送的数据
unsignedchararr[10],DispBuff[10];
voidInitial_IO(void)//IO口初始化
{
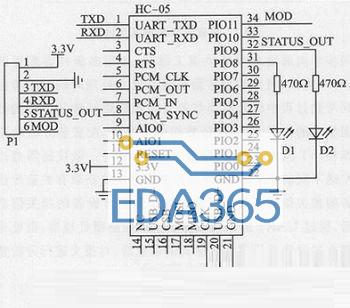
DDRD=0X82;//PD1串口输出,PD0串口输入,PD2模拟串口输入(INT0)
PORTD=0X82;//PD1输出高电平
}
voidInitial_INT0(void)
{
EICRA|=(1
voidInitial_timer0(void)//定时器0初始化
{
TCCR0B|=(1
voidInitial_timer1(void)
{
TCCR1A=(1
TIMSK1|=(1
voidInitial_timer2(void)
{
TCCR2B=(1
voidInitial_WDR(void)//看门狗初始化
{
wdt_enable(WDTO_1S);
wdt_reset();
}
voidInitial(void)
{
Initial_IO();
Initial_timer0();
Initial_timer1();
Initial_timer2();
Initial_INT0();
Initial_WDR();
sei();
}
/*启动串口发送*/
voidSendData(unsignedchar*P,unsignedcharDataLength)
{
TxLength=DataLength;
TxPoint=P;
start=0;
}
intmain(void)
{
Initial();
while(1)
{
wdt_reset();
if((rdata)(eep_ms>10))//收到数据延时10mS后启动发送,回送验证数据
{
key=0;
SendData(DispBuff[0],9);//发送DispBuff[0]的9位数据
while(TxLength);//等待发送完成
rdata=0;
eep_ms=0;
}
}
}
/*定时器0,100us溢出中断*/
SIGNAL(SIG_OVERFLOW0)
{
TCNT0=151;//重载数据,计时区间为151---255,共104uS,一个位的时间
if(TxLength)//
{
if(start==0)
{
Sbit0();//起始位
SUDR=*(TxPoint++);
}
else
{
if((start=8))
{
if(SUDR(1(start-1)))Sbit1();//数据1
elseSbit0();//数据0
}
elseSbit1();//停止位
}
if(start10)start++;
else
{
TxLength--;//一字节发送完成,字节数减1
start=0;
}//
}
}
/*定时器1,1ms溢出中断*/
SIGNAL(SIG_OVERFLOW1)
{
eep_ms++;
}
/*定时器2*/
SIGNAL(SIG_OVERFLOW2)
{
sei();
if(INT0_time)//有数据
{
INT0_time=0;//中断次数清0
rdata=1;//置有数据标志
eep_ms=0;
if(RxLength10)DispBuff[RxLength++]=RUDR;
}
if(rtime4)rtime++;//字节间隔时间,间隔3个字节重新开始一帧
elseRxLength=0;
}
SIGNAL(SIG_INTERRUPT0)//INT0,边沿触发中断
{
unsignedchartemp,temp2=0;
staticunsignedcharpre_TCNT2,j=0;
if(INT0_time==0)//一个字节第一个下降沿中断,起始位开始
{
TCNT2=130;
pre_TCNT2=130;
RUDR=0xff;//接收的数据初值
j=0;//位数清零
INT0_time++;//中断次数加一
}
else
{
temp=TCNT2;
if(temp>pre_TCNT2)temp2=temp-pre_TCNT2;//取一个高/低电平的宽度
if(temp2>10)//滤过窄电平(干扰信号)
{
pre_TCNT2=temp;//记录前一次的时间值
temp=0;
while(temp2>13)//计算位的个数,约13为一个位(8*13=104uS)
{
temp2-=13;//
temp++;
}
if(temp2>6)temp++;//计算位的个数,一般13为一个位
if(INT0_time==1)temp-=1;
if(INT0_time1)//奇数次中断
{
while(temp)//位0的个数
{
RUDR=~(1
j++;
}
}
elsej+=temp;//偶数,位1的个数,跳过
INT0_time++;//中断次数加一
}
}
rtime=0;
}








 热门文章
热门文章