×


ARM ADS全称为ARM Developer suite(ARM开发套件)。ADS的CodeWarrior集成开发环境(IDE)是基于Metrowerks CodeWarrior IDE4.2版本的,经过适当的裁剪以支持ADS工具链,为管理和开发项目提供了简单多样化的图形用户界面,用户可以使用ADS的CodeWarrior IDE为ARM和Thumb处理器开发用C、C++或ARM汇编语言的程序代码,缩短了用户开发项目代码的周期。ADS中包括3个调试器:AXD(ARM ExtendedDebugger)、ARMSD(ARM Symbo l i c Debugger)、ADW/ADU(Appl icat ion Debugger Windows/Unix)。在软件开发的最初阶段,可以使用调试器进行仿真来测试所开发的软件是否达到了预期的效果。
在数据采集的实际开发应用中,串口通信是不可缺少的部分,它是目前嵌入式系统与PC机间的一种非常重要且普遍使用的通信方式。计算机利用串口对单片机等外部设备的控制减少了在访问外部设备时需要进行复杂的汇编语言编程等带来的麻烦,同时也有利于大规模的开发和设计。在Linux系统中,系统把串口等其它外设当作文件进行操作,在端口的读写上非常方便,大大提高了系统编程效率。本文通过把Linux系统移植到S3C2410后,利用S3C2410自带的串口对目标实现控制,详细地介绍了串行通信的硬件电路和软件的实现方法。
S3C2410硬件平台简介
S3C2410是韩国三星公司生产的新一代高性能微处理器,它是基于ARM920T内核的16/32位RISC处理器。主要应用于嵌入式系统中。
S3C2410拥有强大的数据处理能力。又有着低成本。低功耗等优点。在各种手持及移动设备上的应用越来越广泛,基于其平台的程序功能也越来越复杂。于是,在其平台上架构多线程的操作系统已成为越来越多系统设计者的诉求,本文介绍多线程在S3C2410上的具体实现过程。
硬件结构
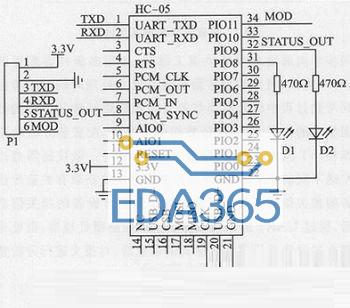
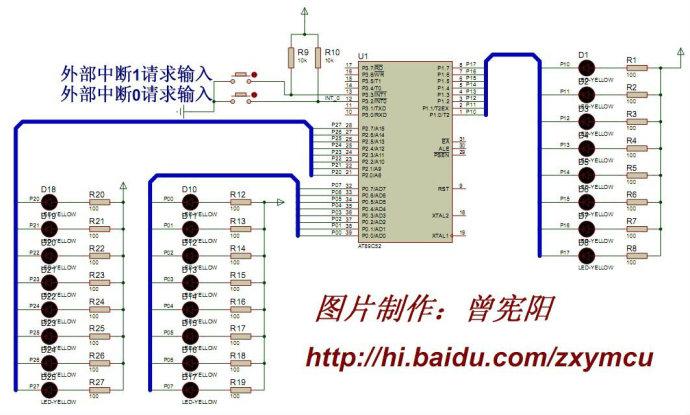
目前串口大部分是在Windows或是在Dos下运用,本文是在Linux系统下利用串口来实现通信的。S3C2410芯片是三星公司生产的 16/32bit的RISC处理器,独立的16kB指令和16 kB数据的缓存(cache),用于虚拟内存管理的MMU单元,LCD控制器(STN&TFT),非线性(NAND)FLASH的引导单元,系统管理器(包括片选逻辑控制和SDRAM控制器),3个通道的异步串口(UART),每个控制器支持的最高波特率可以达到230400 Boud/s,这些特点为实现在Linux系统下计算机与开发板之间顺利进行串口通信提供了可靠的保证。WNSC400是北京维纳光科公司生产的电动位移平台控制箱,它拥有RS232的串口能使S3C2410通过串口对其进行数据通信,从而能够实现S3C2410对电动位移平台的控制。但是控制箱是在 Windows环境下实现的,所以要想把它应用到嵌入式系统中是存在难度的。S3C2410的串口要实现与控制箱的数据传输,那么就要使控制箱及其控制的电动平移台实现与其它模块组成嵌入式系统,比如与一台摄像头联系起来,当摄像头对物体进行图像采集后,对采集数据进行处理,进而计算出目标具体要改变的位移等参量,然后控制箱在通过$3C24lO的存储器中读取这些数据,并发出命令使电动位移平台按需要的改变量进行移动,这样就是实现了一个简单的嵌入式系统。计算机(宿主机)、目标机(S3C2410)还有控制箱之间连接的硬件原理如图1所示。在宿主机上将在ADS环境下编好的程序通过JTAG下载到 S3C2410后,S3C2410就可以通过串口与控制箱进行通信。

UART软件
通用异步收发器(UART)是一种串行接口,许多微处理器和微控制器中都包含这种外设接口。异步串行接口提供了一种简单的途径,使两个器件无需共享同一个时钟信号就能进行通信。如果再加入一个合适的电平转换器,串口还能用在RS-232和RS-485网络中通信,或者与计算机的COM端口连接。串口只需两根信号线(Rx和Tx)即可实现,而且只要两端器件都采用同样的位格式和波特率,那么它们无需其它任何对方的信息就可以成功传输数据。软件UART的意义
如今,可提供功能完善的硬件串口的微控制器比比皆是,那么我们为什么还要费力地用微控制器的端口管脚来实现软件UART呢?主要有以下几个原因:
首先,尽管确实有许多微控制器都包含了硬件UART,但仍有许多没有包含这种接口。在系统设计中,选择微控制器时,可能很难找到一款各方面都很理想的产品。例如,电压范围合适的微控制器可能内部存储器不够大,而存储器大小足够的可能又没有足够的端口管脚,无法满足设计需求。因此,通过软件方式实现某些系统需要的外设接口,从而弥补一款微控制器性能上的缺陷,就能增加可供设计选择的微控制器的数量和种类,从而增大设计的灵活性。
第二,即便一款微控制器包含了一个功能完善的硬件UART,由于某种原因,这对即将进行的设计来说可能仍然不够。例如,可能是微控制器需要与之通信的外设所用的协议与串口协议稍有不同,也可能是硬件UART所提供的位数、奇偶校验功能或输入和输出缓存无法完全满足应用的要求。这时,通过构建一个软件UART接口,我们在定义UART的功能和串口协议的细节上就更灵活。
第三,一款微控制器的硬件UART也许能够很好地满足应用的需求,但只是数量不够。例如,微控制器包含两个UART,而设计中的应用却需要三个。此时,我们不必仅仅为了增加串口的数量就另外增加一块新的芯片,而只需增加一个与该微控制器上现有的UART具备同样功能和特性的软件UART。
UART软件部分的实现
绝大多数的Linux软件开发都是以native方式进行的,即本机(HOST)开发、调试、本机运行的方式,但是由于在目标机上没有足够的资源来满足嵌入式系统的开发,所以这种方式不适合于嵌入式系统的软件开发。通常嵌入式系统软件开发采用交叉编译调试的方法。交叉编译的主要特征是某机器中执行的程序代码不是由本机编译生成,而是由另外一台机器编译生成。
串口通信的基本任务有:实现数据格式化、进行串/并转换、控制数据传输速率、进行错误检测和进行TTl与EIA电平转换。串口通信分为同步通信和异步通信两种类型,本文将用到异步串行I/0。
由于Linux系统将所有的设备都看成文件,所以访问串口时,认为串口是一个文件,我们可以使用文件系统控制函数实现基本的串口操作,比如open()函数用来打开串口,read()和write()函数用来读写串口,在传输数据完成后可以用close()函数关闭串口。
构造了一个嵌入式版本的Linux文件系统,它使得内核在系统尽量精简的情况下能够运行起来,并满足产品和系统各方面的要求。其中,为文件系统配置用户和属组以达到一定的安全性更是系统的一大特色。另外,在这个嵌入式文件系统中,引入了VFS的支持,虽然牺牲了一些空间,但是大大方便了今后各种物理文件系统的动态加载。Linux的文件系统事实上非常的庞大,构造一个嵌入式的Linux文件系统是一个很复杂的过程
串口的基本设置
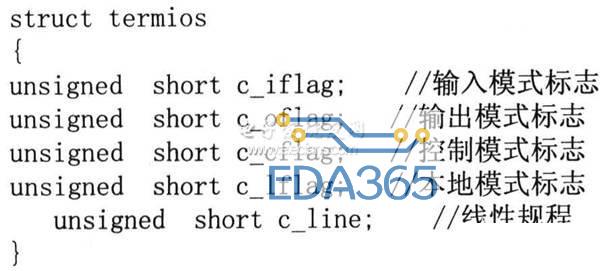
串口最基本的设置有波特率设置、检验位和停止位的设置。串口的设置主要是设置struct termios结构体的各成员值:
串口的读写
发送数据
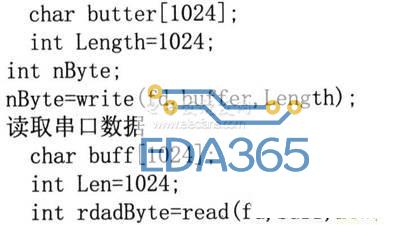
除了上面用read来读取串口的方法外,也可以使用操作文件的函数来实现异步读取,如fcnt1,或者selectt等。
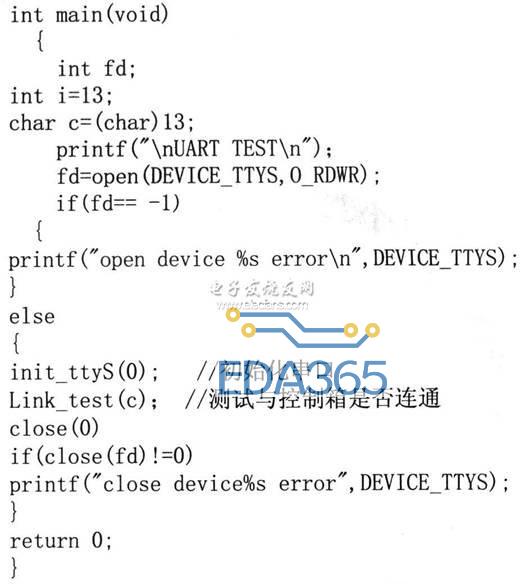
应用程序
ADS开发平台的优点是它已经把串口的相关设置函数都已经包含在相关的头文件中,这样当开发人员想利用串口进行再次研发时就可以直接利用这些函数,或者在原函数上进行修改。本文中要通过S3C2410的串口对WNSC400控制箱进行数据的传输就利用了这些优点,部分程序如下:
结语
在ADS环境下进行的开发减少了直接在Linux系统下进行串口开发所遇到的麻烦,而且由于AARM具有多功能模块扩展功能,可以使多种功能集中起来,为WNSC400控制箱及其电动平移台广泛应用于嵌入式系统中创造了条件。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 大疆做不做军用无人机
大疆做不做军用无人机







 APP下载
APP下载 登录
登录







