×


1 前言
机械手是在机械化、自动化生产过程中发展起来的一种新型装置,被广泛的运用于自动化生产线中。CAN总线是国际上应用最广泛的现场总线之一,以其数据通信具有的突出可靠性、实时性和灵活性的特点,成为机械工业领域首选的现场总线之一。将工业自动化生产线上的众多机械手通过CAN总线进行组网控制,可以实现系统的统一调配与运行,更好地发挥机械手功能。
2 总体控制流程
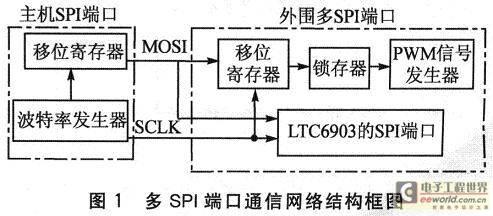
控制系统要实现的是利用工业CAN总线作为多机械手的控制网络,各机械手为控制网络的一个节点,将多个机械手搭建在CAN总线上,通过对总线的监测与控制,完成所需的相应功能。系统的总体控制流程,如图1所示。每个节点的机械手均通过CAN总线接口连接在CAN bus上,各个节点从CAN总线接收需要的数据包,从而通过控制器对机械手动作,同时,各个节点也将机械手动作的实时信息通过CAN接口传送到CAN bus上,进而形成完整的闭环控制系统。
图1 总体控制流程
3 机械系统设计
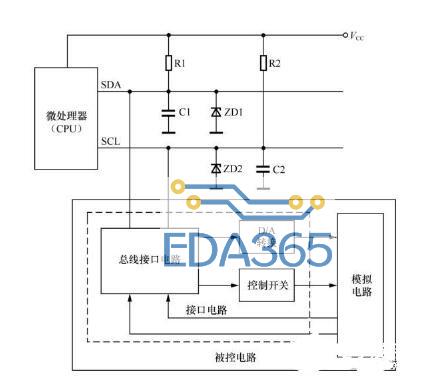
设计的机械手是一种二自由度的抓物机械手臂。抓物机械手臂的抓物过程,可以用两个电机分别带动两个活动臂的运动来完成。一个用于控制竖直方向的手臂位移量,另一个用于控制夹住目标物体的执行机构。当控制物体高度的信号发出后,传感部件将物体的位置(高度)信号传递给控制器,然后控制器发出高度控制信号控制步进电机,步进电机带动中轴旋转,从而使得与之扣合的横臂运动,行走机械部分开始运动。当行走机械部分停止后,从外部发来一个手臂启动信号,控制器发出抓物信号,经由集成驱动电路单元放大整合后发给伺服电机,使得机械手抓闭合,执行抓物。抓物过程结束后,手臂控制系统发送一个动作完成成功信号叫馈给控制电路。
其中,A组电线接步进电机的控制端,当步进电机接收单片饥发出的脉冲时,带动机械手中轴转动。中轴 有螺纹,和横臂以螺纹连接,这使得中轴的转动通过螺纹带动横臂随之上升或下降。B组电线接伺服电机的控制端,伺服电机接收单片机发出的脉冲时,带动机械手爪按人们的意愿闭合或张开,从而抓取或放下物件。C组接反馈控制电路,抓物过程结束后,手臂控制系统发送一个动作完成成功信号回馈给控制电路。
图2 抓物机械手臂设计图
4. CAN总线控制系统设计
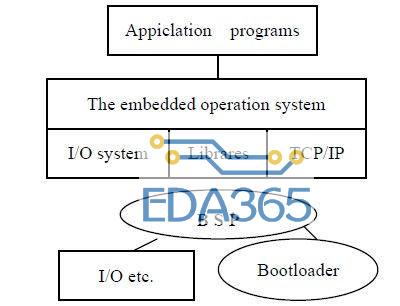
4.1 CAN总线接口的构成CAN总线接口设计最通用、最广泛的方法是采用“微控制器+CAN控制器+CAN收发器”的组合,这里介绍目前市场上使用最为普遍、流行的独立CAN控制器SJA1000,以及高速CAN收发器PCA82C250。CAN总线接口的结构。
图3 CAN总线接口结构
SJA1 000阁是一一种独立的CAN控制器,主要用于移动目标和一般工业环境中的区域网络控制。SJA1000的控制寄存器、命令寄俘器、状态寄存器、发送缓冲器等,均为8位,设置各寄存器中的参数可实现不同的操作功能。SJA 1000有两种工作模式,即BasicCAN模式和PeliCAN模式。在这两种模式中,SJA1000寄存器从数量、地址分配到功能等方面都有所区别。SJA1000在复位状态下的默认模式为BasicCAN模式。CAN控制器在两种模式中又都有两种状态模式,分别称为操作模式和复位模式。处在这两种不同状态的模式中,对寄存器的访问操作功能是不同的。PCA82C250f6是CAN控制器与物理总线之间的接口,器件可以提供对总线的差动发送和接收功能。PCA82C250驱动电路内部具有限流电路,可防止发送输出级对电源、地或负载短路。虽然短路出现I讨功耗增加,但不至于使输出级损坏。若结温超过大约160度,则两个发送器输出端极限电流将减小 由于发送器是功耗的主要部分,因而限制了芯片的温升,器件的所有其他部分将继续工作。PCA82C250采用双线差分驱动,有助于抑制汽车等恶劣电气环境下的瞬变干扰。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 分析CAN总线国内外发展与应用状况
分析CAN总线国内外发展与应用状况




 APP下载
APP下载 登录
登录







