×


引言
开发新能源和可再生能源是全世界面临的共同课题,太阳能发电已成为全球发展速度最快的技术。在新能源中,光伏发电是最具可持续发展理想特征的可再生能源技术,受到全世界的普遍重视。
太阳能光伏发电作为太阳能利用的主要方式之一,因其资源潜力大、可持续利用等特点,成为各国竞相发展的重点。但光伏发电成本过高是长期制约其高速发展的主要问题,其解决途径之一便是提高发电系统的发电量,使平板光伏组件受光面时刻正对太阳,相同的辐照条件下吸收比固定安装光伏组件更多的太阳辐射能量,从而达到降低光伏发电成本的目的。
相关理论分析表明:太阳的双轴跟踪与非跟踪,能量的接收率相差41.34%,精确的跟踪太阳可使接收器的热接收效率大大提高,拓宽了太阳能的利用领域。该双轴装置按预定的位置调整太阳能电池板朝向,结构简单、不必人工干预,特别适合天气变化比较复杂和无人值守的情况,有效地提高了太阳能装置的太阳能利用率,有较好的推广应用价值。
太阳能伺服跟踪系统设计
(1)太阳跟踪方式选择
按照不同的分类方法,太阳跟踪方式通常有传感器跟踪和视日运动轨迹跟踪(程序控制),还有单轴跟踪和双轴跟踪。
传感器跟踪[3]是利用光电传感器检测太阳光是否偏离电池板法线,当太阳光偏离电池板法线时,传感器发出偏差信号,经放大、运算后控制执行机构,使跟踪装置重新对准太阳光。这种跟踪方式的优点是灵敏度高;缺点是受天气影响大,阴雨天则无法对准太阳,甚至引起执行机构的误动作。视日运动轨迹跟踪(程序控制),是根据太阳的实际运行轨迹按预定的程序调整跟踪装置跟踪太阳。这种跟踪方式能够全天候实时跟踪,其精度不高,但是符合实际运行情况,应用较广泛。
单轴跟踪只是在方位角跟踪太阳,高度角作季节性调整。双轴跟踪是在方位角和高度角两个方向跟踪太阳轨迹.显然双轴跟踪的效果优于单轴跟踪。
目前,以双轴跟踪为基础的传感器双轴跟踪或程序控制双轴跟踪方式被普遍采用.在美国加州建造的发电功率约为300~600mw的太阳能斯特林电厂中,所有太阳能集热器都采用双轴跟踪系统。
(2)视日运动轨迹跟踪设计
太阳每天东升西落,站在地球表面的人会观测到太阳很有规律的在天球上运动。视日运动轨迹跟踪就是利用PLC控制单元根据相应的公式和参数计算出白天时太阳的实时位置,然后发出指令给伺服电机去驱动太阳跟踪装置,以达到对太阳实时跟踪的目的。太阳在天球上的位置可由太阳高度角αs和太阳方位角γs来确定。太阳高度角αs又称太阳高度、太阳俯仰角,是指太阳光线与地表水平面之间的夹角
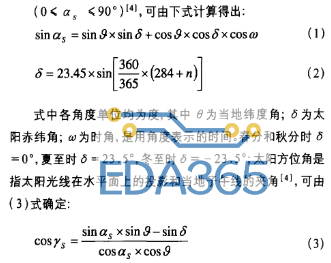
在太阳轨迹公式(1),(2),(3)中,涉及到3个天文地理坐标,即太阳赤纬角δ、纬度角δ和时角ω。太阳能光伏发电地点的地理经纬度通过gps等精密导航仪器可以方便获得。而赤纬角和时角的计算需要通过时间确定,由于太阳在一年中的时角运动很复杂,日常生活中的钟表时间采用平太阳时,即太阳沿着周年运动的平均速率,在工程计算中,就会存在时差问题(真太阳时与平太阳时之差),因此必须采用真太阳时(t0),否则在实际计算中无法到达精度要求。为了得到准确的真太阳时(t0),可以根据定时标准来校正时差值,我国区域的时差确定如下:

式中t为北京时间。另外n为1年中的日期序号,从1月1号开始起数,n=1,每往后加一天,n=n+1,比如我们在此输入165(天),就相当于今年的6月12日,输入286(天),就相当于今年的10月13日,其他以此类推。
其中,当太阳在正南方向时,(3)式中的方位角γs=0°,正南以西γs》0°,正南以东γs《0°。为了有效跟踪太阳的位置,除了要计算出太阳的实时位置外,还需要知道具体某天的日出时角ω1、日落时角ω2。由于日出日落时太阳高度角αs=0°,由(1)式可计算出:

计算出日出时角,日落时角后,由(7)式可得出日出时间t1和日落时间t2。
(3)控制系统核心部件plc
可编程逻辑控制器plc[6]是太阳能跟踪系统的核心部件,系统采用结构紧凑、配置灵活和指令集强大的欧姆龙公司cp1h-x系列的plc;用户程序包括浮点数运算、定时器、脉冲指令输出等复杂的数学运算以及特殊功能寄存器等指令内容,从而使cx-programmer能够监视输入状态,改变输出状态,以达到控制的目的。另外,选用cp1h不仅能用于独立的太阳能设备跟踪系统控制,特别是对于串、并联的大型光伏太阳能阵列的跟踪系统控制,能发挥plc现场总线的控制优势进行集中控制。
(4)风速传感器模块
为了保护跟踪装置组件不被大风吹坏,设计了大风响应中断子程序。风速达到13m/s时,风速传感器输出脉冲信号,程序进入高速脉冲中断响应子程序,太阳电池板自动放平,停止跟踪,大风过后5分钟快速恢复自动跟踪[7]。风速传感器可以对多个太阳电池方阵进行群控,而且具有可靠性高,抗干扰能力强,使用方便,适合恶劣环境工作等特点。
(5)控制系统硬件电路的设计
实现x-y二维聚光发电伺服跟踪系统控制硬件结构基本配置如下:上位机采用欧姆龙plc、欧姆龙电机及其驱动器。

在一天的整个过程中,跟踪器获得最优的俯仰角和方位角,电池板接收到最大太阳日辐射量。系统由一台欧姆龙伺服电机和减速机构成方位角转动机构,一台欧姆龙伺服电机和直线导轨构成高度角转动机构。光伏跟踪系统设计采用了开环程序控制方式,避免了偶尔云层遮挡太阳能伺服跟踪系统造成的干扰。首先用一套公式通过上位机plc算出在给定时间太阳的位置,即实际时刻太阳所在高度角和方位角,再计算出跟踪装置被要求的位置,这个位置乘以相关比例系数得到高度角和方位角电机所需的脉冲数,最后通过电机转动装置达到要求的位置,实现对太阳高度角和方位角的跟踪。跟踪系统结构图如图1所示。
利用逆变器能够将光伏电池产生的直流电转变为交流电,进而直接输送到电网上。在白天有日照的情况下,光伏电池会将大部分的能量输送到电网上,而到了晚上光伏电池装置会自动与电网断开。
本文所设计跟踪调整装置其结构如图2所示。它主要由底座、立轴、横轴、两台伺服电机、传动齿轮副、丝杆导轨等组成。其中伺服电机a驱动传动齿轮副,使传动齿轮副驱动立轴,令其跟踪太阳方位角的变化;伺服电机b驱动丝杠导轨,支撑太阳能电池板绕横轴作俯仰动作,以跟踪太阳高度角的变化。

控制系统的实现取决于两方面:
①电机控制部分和驱动部分;
②风速传感器。对于电气控制部分和驱动部分,我们选择相对领域有优势厂商的部件,尤其考虑到运行温度范围和环境。运行温度范围是-25℃到55℃。
跟踪器的运行状态可传送给监测台。不仅监测还可远程控制达到稳定。在系统的扩展和配置设计中,应遵循以下原则:
①尽可能选择典型电路,为硬件系统的标准化、模块化打下基础。
②系统的扩展与外围设备配置的水平应充分满足应用系统的功能要求,并留有适当余地,以便进行二次开发。
③硬件结构应结合应用软件方案一起考虑。
④系统中相关器件要尽可能做到性能匹配。
系统软件设计
跟踪模式的判断过程完全由软件实现, 灵活度很高, 可以针对不同的地区和不同的气候进行调整,尽量提高光伏电站的发电效率。还可以根据需要,增加光强传感器、风力传感器等多种传感装置。图3为跟踪控制系统程序流程图。

风速传感器响应中断子程序是有大风来时,plc接受到风速传感器的高速脉冲,达到规定的脉冲数响应中断,太阳电池板放平以保护电池板组件。图4为大风中断子程序框图。
太阳能电池板有两个自由度, 控制机构将分别对x、y 两方向进行调整。当电池板转到尽头时,由于跟踪装置装了限位触感器,到限位触点时自动切断脉冲输出,电机停止动作,起硬件保护作用。

结论
本文介绍了双轴伺服太阳能自动跟踪系统能自动检测昼夜,实时跟踪太阳。以欧姆龙plc作为控制器,计算出太阳的实时位置转化为脉冲发送给伺服驱动器,驱动电机转动跟踪装置跟踪太阳,因此使得该自动跟踪系统的准确性高、可靠性强。即使是在天气变化比较复杂的情况下,系统也能正常工作,提高太阳能的利用效率。如果应用于太阳能电池板,则可将电池板输出的直流电逆变为交流电,直接获取电能,而无需另外输入能量。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 微型电机位置传感器的三种类型
微型电机位置传感器的三种类型








 APP下载
APP下载 登录
登录







