
要了解两者的区别,我们需要先对每一个对象都要深入了解一 下。 首先了解一下工作原理, 步进电机的工作原理是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,就驱动步进电机按设定的方向转动一个固定的角度,它的旋转是以固定的角度一步-一步运行的。可以通过控制发出脉冲个数来控制角位移量,从而达到控制位移的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。而伺服电机内部的转 子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的分辨率。

第一,步进电机和伺服电机的控制方式不同,步进电机是通过控制脉冲的个数控制转动角度的,一个脉冲对应一个步距角,但是没有反馈信号,电机不知道具体走到了什么位置,位置精度不够高。 伺服电机也是通过控制脉冲个数,伺服电机每旋转一 个角度,都会发出对应数量的脉冲,同时驱动器也会接收到反馈回来的信号,和伺服电机接受的脉冲形成比较,这样系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
第二, 过载能力不同步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。以皮尔磁交流伺服系统为例,它具有速度过载和转矩过载能力。其最大转矩为额转矩的3倍,可用于克服惯性负载在启动瞬间的惯性力矩。步进电机因为没有这种过载能力,在某些工作场合就不能用步进电机工作了。
第三, 速度响应性能不同步进电机从静止加速到工作转速(一般为每分钟几百转) 需要200 ~ 400ms。交流伺服系统的加速性能较好,以皮尔磁交流伺服电机为例,从静止加速到其额定转速3000 r/min。仅需几ms,可用于要求快速启停并且位置精度要求较高的控制场台。
步进电机和伺服电机是工控领域应用最广泛的两类产品,而它们的核心分别是步进电机控制器与伺服电机控制器。
步进电机控制器:它是一种能够发出均匀脉冲信号的电子产品,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。步进电机控制器能够准确的控制步进电机转过每一个角度。驱动器所接收的是脉冲信号,每收到一个脉冲,驱动器会给电机一个脉冲使电机转过一个固定的角度,就因为这个特点,步进电机才会被广泛的应用到现在的各个行业里。
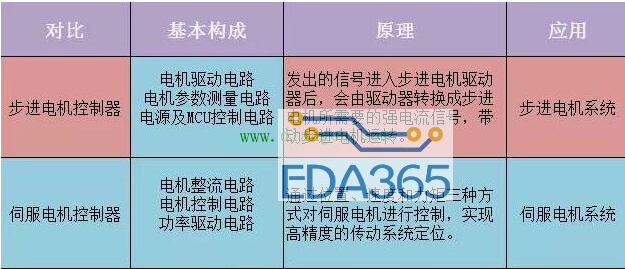
伺服电机控制器:它是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
1、步进电机控制器的三大电路
电机驱动电路:在H桥电路的基础上设计步进电机驱动电路。采用分立元件MOS管搭建双H桥驱动电路是成熟的电机控制方案,电路不复杂,根据MOS管的不同工作电流的上限甚至可以高达数十安培,是理想的步进电机驱动器方案。

电机参数测量电路:电机电流采样电阻选用康铜电阻,一端连接H桥下方,另一端接GND。电压电流信号调理电路采用LM324运放搭建,电压跟随后送入MCU,由MCU内置10Bit A/D转换器进行A/D采样。机壳温度监测选用数字温芯片DS18B20,将其贴至电机外壳表面,实时监测温度参数并送入MCU。
电源及MCU控制电路:系统中的驱动电路用输入电压供电,MCU和蓝牙模块需要额外的3.3V电压供电,传统的线性稳压器效率低、尺寸大且发热严重,因此使用DC—DC开关电源方式提供3.3V电压,保证器件的正常工作。
2、伺服电机控制器的电路组成
电机整流电路:整流单元主要的拓扑电路是三相全桥不控整流电路,实质是一组共阴极与一组共阳极的三相半波可控整流电路的串联,习惯将其中阴极连接在一起的三个晶间管称为共阴极组;阳极连接在一起的三个晶闸管称为共阳极组。

功率驱动电路:功率驱动单元一般采用智能功率模块,通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流。功率单元是使用功率电力电子器件进行整流、滤波、逆变的高压变频器部件,主要由整流桥、可控硅、电解电容、IGBT等器件组成。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。
电机控制电路:主电路采用数字信号处理器作为控制核心,可以实现比较复杂的控制算法,进行智能控制。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 变频器未来发展凸现六种特性
变频器未来发展凸现六种特性









 APP下载
APP下载 登录
登录







