
军方一直是传感器数据融合的先驱,“通过使用来自多个分布式源的数据,可以获得更低的检测错误概率和更高的可靠性”。
如今,智能手机和汽车中的高级传感应用经常使用传感器融合。但是,先进的工业应用(例如复杂的机器人)也利用了该技术。传感器融合实际上是数据融合的子类别,也称为多传感器数据融合或传感器数据融合。
对于智能手机中的位置感测,来自加速度计,陀螺仪和磁力计的数据相结合,可提供比单独使用任何这些传感器都能获得的更好的结果。在汽车中,来自雷达,LiDAR和相机的数据以及地图和其他数据源被组合在一起,以在自动驾驶情况下做出决策。在机器人中,来自视觉系统和惯性测量单元(IMU)的数据被组合在一起,以改善机械臂的运动并提高采样率。
军方一直是传感器数据融合的先驱,“通过使用来自多个分布式源的数据,可以获得更低的检测错误概率和更高的可靠性”。
1987年,美国国防部(DOD)实验室联合主管(JDL)数据融合小组制定了数据融合的定义,该定义进一步完善为“多层次,多方面的过程,涉及自动检测,关联,相关,估计,以及来自单一或多个来源的数据和信息的组合。”
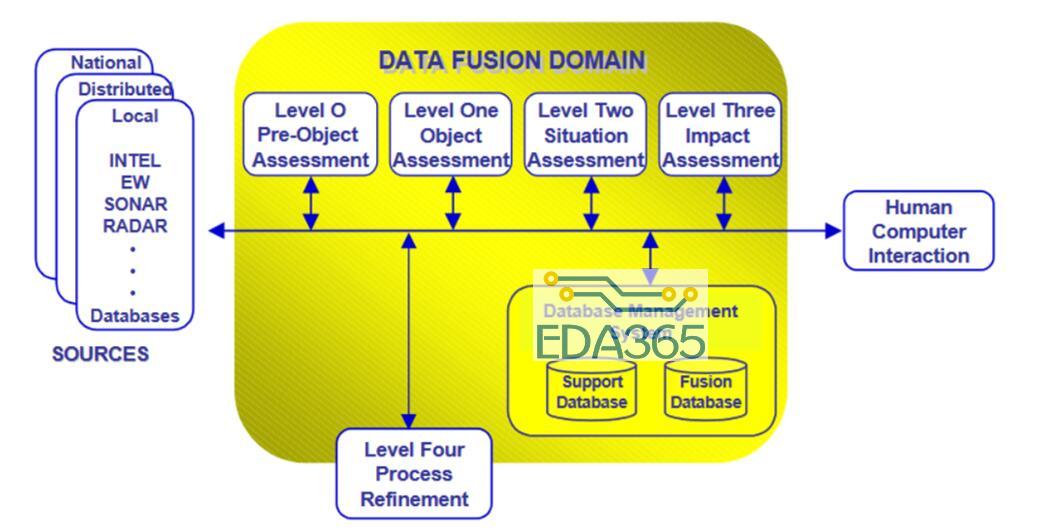
JDL数据融合过程模型的顶层视图
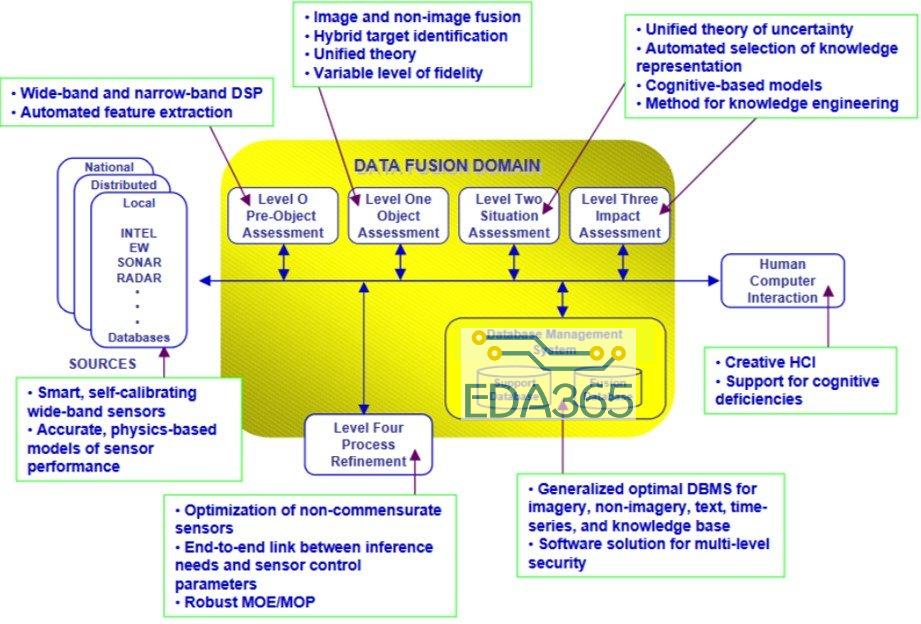
传感器数据融合的技术要求
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 智能家居常用的四种传感器
智能家居常用的四种传感器






 APP下载
APP下载 登录
登录







