×


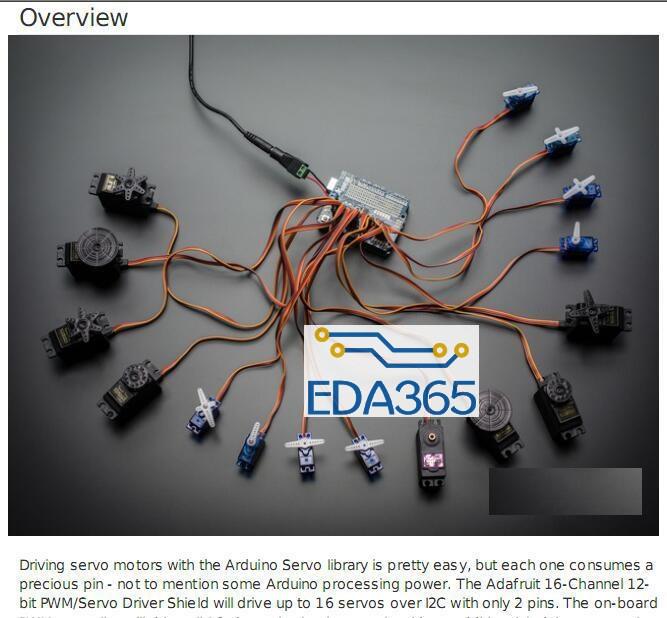
16路模块 PWM舵机驱动板 控制器 机器人 IIC接口 使用说明书
AdafruitPWMServoDriverLibrary单片机源程序如下:
/***************************************************
This is a library for our Adafruit 16-channel PWM & Servo driver
Pick one up today in the adafruit shop!
These displays use I2C to communicate, 2 pins are required to
interface. For Arduino UNOs, thats SCL -> Analog 5, SDA -> Analog 4
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, all text above must be included in any redistribution
****************************************************/
#include
#include
#if defined(__AVR__)
#define WIRE Wire
#elif defined(CORE_TEENSY) // Teensy boards
#define WIRE Wire
#else // Arduino Due
#define WIRE Wire1
#endif
// Set to true to print some debug messages, or false to disable them.
#define ENABLE_DEBUG_OUTPUT true
Adafruit_PWMServoDriver::Adafruit_PWMServoDriver(uint8_t addr) {
_i2caddr = addr;
}
void Adafruit_PWMServoDriver::begin(void) {
WIRE.begin();
reset();
}
void Adafruit_PWMServoDriver::reset(void) {
write8(PCA9685_MODE1, 0x0);
}
void Adafruit_PWMServoDriver::setPWMFreq(float freq) {
//Serial.print("Attempting to set freq ");
//Serial.println(freq);
freq *= 0.9; // Correct for overshoot in the frequency setting (see issue #11).
float prescaleval = 25000000;
prescaleval /= 4096;
prescaleval /= freq;
prescaleval -= 1;
if (ENABLE_DEBUG_OUTPUT) {
Serial.print("Estimated pre-scale: "); Serial.println(prescaleval);
}
uint8_t prescale = floor(prescaleval + 0.5);
if (ENABLE_DEBUG_OUTPUT) {
Serial.print("Final pre-scale: "); Serial.println(prescale);
}
uint8_t oldmode = read8(PCA9685_MODE1);
uint8_t newmode = (oldmode&0x7F) | 0x10; // sleep
write8(PCA9685_MODE1, newmode); // go to sleep
write8(PCA9685_PRESCALE, prescale); // set the prescaler
write8(PCA9685_MODE1, oldmode);
delay(5);
write8(PCA9685_MODE1, oldmode | 0xa1); // This sets the MODE1 register to turn on auto increment.
// This is why the beginTransmission below was not working.
// Serial.print("Mode now 0x"); Serial.println(read8(PCA9685_MODE1), HEX);
}
void Adafruit_PWMServoDriver::setPWM(uint8_t num, uint16_t on, uint16_t off) {
//Serial.print("Setting PWM "); Serial.print(num); Serial.print(": "); Serial.print(on); Serial.print("->"); Serial.println(off);
WIRE.beginTransmission(_i2caddr);
WIRE.write(LED0_ON_L+4*num);
WIRE.write(on);
WIRE.write(on>>8);
WIRE.write(off);
WIRE.write(off>>8);
WIRE.endTransmission();
}
// Sets pin without having to deal with on/off tick placement and properly handles
// a zero value as completely off. Optional invert parameter supports inverting
// the pulse for sinking to ground. Val should be a value from 0 to 4095 inclusive.
void Adafruit_PWMServoDriver::setPin(uint8_t num, uint16_t val, bool invert)
{
// Clamp value between 0 and 4095 inclusive.
val = min(val, 4095);
if (invert) {
if (val == 0) {
// Special value for signal fully on.
setPWM(num, 4096, 0);
}
else if (val == 4095) {
// Special value for signal fully off.
setPWM(num, 0, 4096);
}
else {
setPWM(num, 0, 4095-val);
}
}
else {
if (val == 4095) {
// Special value for signal fully on.
setPWM(num, 4096, 0);
}
else if (val == 0) {
// Special value for signal fully off.
setPWM(num, 0, 4096);
}
else {
setPWM(num, 0, val);
}
}
}
uint8_t Adafruit_PWMServoDriver::read8(uint8_t addr) {
WIRE.beginTransmission(_i2caddr);
WIRE.write(addr);
WIRE.endTransmission();
WIRE.requestFrom((uint8_t)_i2caddr, (uint8_t)1);
return WIRE.read();
}
void Adafruit_PWMServoDriver::write8(uint8_t addr, uint8_t d) {
WIRE.beginTransmission(_i2caddr);
WIRE.write(addr);
WIRE.write(d);
WIRE.endTransmission();
}
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 51单片机中断源的扩展方法
51单片机中断源的扩展方法







 APP下载
APP下载 登录
登录







