×


STM32F10x 系列单片机中都包含了USART 模块,所谓USART,就是通用同步异步收发器。通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。它支持同步单向通信和半双工单线通信,也支持LIN(局部互连网),智能卡协议和IrDA(红外数据组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。它还允许多处理器通信。
从前面的介绍可知USART模块功能非常的强大。这里我只简单讲讲如何用USART模块来实现标准EIA-232 串口通讯。
用过单片机的人肯定都接触过串口,设置串口无非就是设置波特率、数据位、停止位、奇偶校验位。发送接收也就三种基本方式,轮询、中断和DMA。STM32F10x 的USART 模块也不过如此。所以我重点讲讲我在调试代码时犯得各种错误,那些很容易得到的代码就不详细的讲解了。
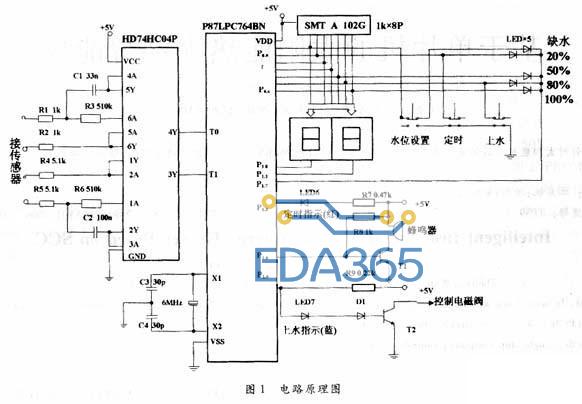
首先说说我的硬件环境。还是那块神舟4号开发板,用的是串口2,对应的是USART2。默认情况下USART2是连接到IO端口A的,但是我这里需要将USART的管腿重定向到IO端口D上。具体的管腿的关系参见下表。这个表是从STM32参考手册上拷下来的。
初始化USART的代码很简单。USART2 连接到APB1 总线上了,先要打开USART2的时钟,然后设置波特率一类的参数。
USART_InitTypeDef USART_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure );
这样设置了还不能使用。因为我们将USART2 重定向了。重定向操作需要写复用重映射和调试I/O配置寄存器(AFIO_MAPR)。GPIO_PinRemapConfig() 可以完成这项任务。
GPIO_PinRemapConfig(GPIO_Remap_USART2, ENABLE);
光这样操作还不够。STM32参考手册上有这么一段话:
对寄存器AFIO_EVCR,AFIO_MAPR和AFIO_EXTICRX进行读写操作前,应当首先打开AFIO的时钟。参考第6.3.7节APB2外设时钟使能寄存器(RCC_APB2ENR)。
所以需要先打开AFIO的时钟。因此,USART2的重定向需要两步操作:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_USART2, ENABLE);
我原以为这样就能工作了,可是结果还是什么都没有输出。没办法只能继续研究。在读GPIO的相关章节时看到下图让我恍然大悟。
USART2的输入输出都是借用PD口管腿,PD 口的时钟却还没给。用到的几个IO 端口也没有设置相应的输入输出状态。在读到8.1.9 复用功能配置这一小节时发现了如下的表格。
按照上面给出的配置,写好程序:
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD , ENABLE);
/* Configure USART Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/* Configure USART Rx as input floating */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOD, &GPIO_InitStructure);
再次测试,一切正常。
发送一个字符的函数可以这么写:
void UART_PutChar(USART_TypeDef* USARTx, uint8_t Data)
{
while (USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET ) {};
USART_SendData (USARTx, Data);
}
这个函数可以手工优化一下,里面的两个函数调用都可以去掉,甚至于这个函数可以用汇编来实现或者写成inline 函数。不过这里只是个示例代码,没有考虑这些。
发送字符串的函数如下:
void UART_PutStr (USART_TypeDef* USARTx, uint8_t *str)
{
while (0 != *str)
{
UART_PutChar(USARTx, *str);
str++;
}
}
上面串口初始化的代码可以放到一个函数中:
void USART2_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_AFIO, ENABLE);
/* Configure USART Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/* Configure USART Rx as input floating */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_Remap_USART2, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure );
USART_Cmd(USART2, ENABLE);
}
今天先写这么多。接收字符的函数与发送字符的函数差不多,但是这种轮询方式效率很低,不建议使用。下次写一篇介绍如何用中断方式发送接收串口数据,中断方式的效率会高很多。如果有时间再写一篇DMA方式发送接收数据的文章。
这次讲讲利用串口收发中断来进行串口通讯。STM32 上为每个串口分配了一个中断。也就是说无论是发送完成还是收到数据或是数据溢出都产生同一个中断。程序需在中断处理函数中读取状态寄存器(USART_SR)来判断当前的是什么中断。下面的中断映像图给出了这些中断源是如何汇合成最终的中断信号的。图中也给出了如何控制每一个单独的中断源是否起作用。
另外,Cortex-M3 内核中还有个NVIC,可以控制这里的中断信号是否触发中断处理函数的执行,还有这些外部中断的级别。关于NVIC 可以参考《ARM CortexM3 权威指南》,里面讲解的非常详细。
简单的说,为了开启中断,我们需要如下的代码:
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启接收中断
USART_ITConfig(USART1, USART_IT_TXE, ENABLE); // 开启发送中断
这里多说一句,串口的发送中断有两个,分别是:
l发送数据寄存器空中断(TXE)
l发送完成中断(TC)
一般来说我们会使用发送数据寄存器空中断,用这个中断发送的效率会高一些。
中断处理函数的框架如下,如果检测到错误就清除错误,收到数了就处理。发完当前数据了就发下一个。
void USART1_IRQHandler(void)
{
unsigned int data;
if(USART1->SR & 0x0F)
{
// See if we
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 51单片机中断源的扩展方法
51单片机中断源的扩展方法







 APP下载
APP下载 登录
登录







