×


ADXL345 是 ADI 公司的一款 3 轴、数字输出的加速度传感器。ADXL345 是 ADI 公司推
出的基于 iMEMS 技术的 3 轴、数字输出加速度传感器。该加速度传感器的特点有:
分辨率高。最高 13 位分辨率。
量程可变。具有+/-2g,+/-4g,+/-8g,+/-16g 可变的测量范围。
灵敏度高。最高达 3.9mg/LSB,能测量不到 1.0°的倾斜角度变化。
功耗低。40~145uA 的超低功耗,待机模式只有 0.1uA。
尺寸小。整个 IC 尺寸只有 3mm*5mm*1mm,LGA 封装。
ADXL 支持标准的 I2C 或 SPI 数字接口,自带 32 级 FIFO 存储,并且内部有多种运动状态
检测和灵活的中断方式等特性
加速度传感器一般都有三个轴,垂直于芯片为Z轴,检测重力,平行于芯片分别为XY轴,三个轴得到三种加速度,经过合成,可以得到物体在匀速运动时候的姿态,这是一个相对静止的姿态,
因为静止状态,物体仅受到重力加速度的影响,通过姿态重力加速度产生分量作用在三个轴上,通过这个分量可以计算加速度传感器和地面参考系之间的夹角从而得到姿态
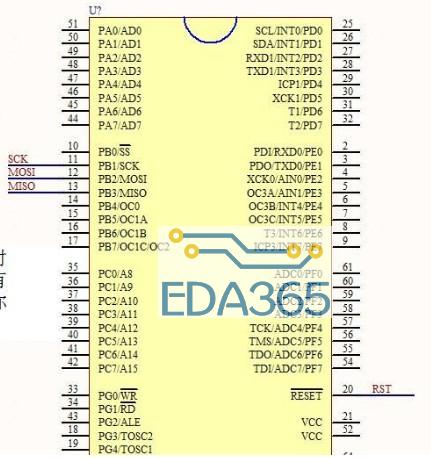
因为是IIC总线,所以还是居于IIC标准通讯的,修改功能使能IIC总线修改寄存器即可,寄存器框图如下
对于加速度传感器的功能配置各有不同,以下是基础配置的代码
#include "adxl345.h"
#include "delay.h"
#include "math.h"
//初始化ADXL345.
//返回值:0,初始化成功;1,初始化失败.
u8 Adxl345Init(void)
{
IIcInit(); //初始化IIC总线
if(Adxl345ReadReg(DEVICE_ID)==0XE5) //读取器件ID
{
Adxl345WRReg(DATA_FORMAT,0X2B); //低电平中断输出,13位全分辨率,输出数据右对齐,16g量程
Adxl345WRReg(BW_RATE,0x0A); //数据输出速度为100Hz
Adxl345WRReg(POWER_CTL,0x28); //链接使能,测量模式
Adxl345WRReg(INT_ENABLE,0x00); //不使用中断
Adxl345WRReg(OFSX,0x00);
Adxl345WRReg(OFSY,0x00);
Adxl345WRReg(OFSZ,0x00);
return 0;
}
return 1;
}
//写ADXL345寄存器
//addr:寄存器地址
//val:要写入的值
//返回值:无
void Adxl345WRReg(u8 addr,u8 val)
{
IIcStart();
IIcSendByte(ADXL_WRITE); //发送写器件指令
IIcWaitAck();
IIcSendByte(addr); //发送寄存器地址
IIcWaitAck();
IIcSendByte(val); //发送值
IIcWaitAck();
IIcStop(); //产生一个停止条件
}
//读ADXL345寄存器
//addr:寄存器地址
//返回值:读到的值
u8 Adxl345ReadReg(u8 addr)
{
u8 temp=0;
IIcStart();
IIcSendByte(ADXL_WRITE); //发送写器件指令
temp=IIcWaitAck();
IIcSendByte(addr); //发送寄存器地址
temp=IIcWaitAck();
IIcStart(); //重新启动
IIcSendByte(ADXL_READ); //发送读器件指令
temp=IIcWaitAck();
temp=IIcReadByte(0); //读取一个字节,不继续再读,发送NAK
IIcStop(); //产生一个停止条件
return temp; //返回读到的值
}
//读取ADXL的平均值
//x,y,z:读取10次后取平均值
void Adxl345ReadAvval(short *x,short *y,short *z)
{
short tx=0,ty=0,tz=0;
u8 i;
for(i=0;i<10;i++)
{
Adxl345ReadXyz(x,y,z);
DelayMs(10);
tx+=(short)*x;
ty+=(short)*y;
tz+=(short)*z;
}
*x=tx/10;
*y=ty/10;
*z=tz/10;
}
//自动校准
//xval,yval,zval:x,y,z轴的校准值
void Adxl345AutoAdjust(char *xval,char *yval,char *zval)
{
short tx,ty,tz;
u8 i;
short offx=0,offy=0,offz=0;
Adxl345WRReg(POWER_CTL,0x00); //先进入休眠模式.
DelayMs(100);
Adxl345WRReg(DATA_FORMAT,0X2B); //低电平中断输出,13位全分辨率,输出数据右对齐,16g量程
Adxl345WRReg(BW_RATE,0x0A); //数据输出速度为100Hz
Adxl345WRReg(POWER_CTL,0x28); //链接使能,测量模式
Adxl345WRReg(INT_ENABLE,0x00); //不使用中断
Adxl345WRReg(OFSX,0x00);
Adxl345WRReg(OFSY,0x00);
Adxl345WRReg(OFSZ,0x00);
DelayMs(12);
for(i=0;i<10;i++)
{
Adxl345ReadAvval(&tx,&ty,&tz);
offx+=tx;
offy+=ty;
offz+=tz;
}
offx/=10;
offy/=10;
offz/=10;
*xval=-offx/4;
*yval=-offy/4;
*zval=-(offz-256)/4;
Adxl345WRReg(OFSX,*xval);
Adxl345WRReg(OFSY,*yval);
Adxl345WRReg(OFSZ,*zval);
}
//读取3个轴的数据
//x,y,z:读取到的数据
void Adxl345ReadXyz(short *x,short *y,short *z)
{
u8 buf[6];
u8 i;
IIcStart();
IIcSendByte(ADXL_WRITE); //发送写器件指令
IIcWaitAck();
IIcSendByte(0x32); //发送寄存器地址(数据缓存的起始地址为0X32)
IIcWaitAck();
IIcStart(); //重新启动
IIcSendByte(ADXL_READ); //发送读器件指令
IIcWaitAck();
for(i=0;i<6;i++)
{
if(i==5)buf[i]=IIcReadByte(0);//读取一个字节,不继续再读,发送NACK
else buf[i]=IIcReadByte(1); //读取一个字节,继续读,发送ACK
}
IIcStop(); //产生一个停止条件
*x=(short)(((u16)buf[1]<<8)+buf[0]);
*y=(short)(((u16)buf[3]<<8)+buf[2]);
*z=(short)(((u16)buf[5]<<8)+buf[4]);
}
//读取ADXL345的数据times次,再取平均
//x,y,z:读到的数据
//times:读取多少次
void Adxl345ReadAverage(short *x,short *y,short *z,u8 times)
{
u8 i;
short tx,ty,tz;
*x=0;
*y=0;
*z=0;
if(times)//读取次数不为0
{
for(i=0;i
#ifndef __ADXL345_H
#define __ADXL345_H
#include "iic.h"
#include "uart.h"
#define DEVICE_ID0X00 //器件ID,0XE5
#define THRESH_TAP0X1D //敲击阀值
#define OFSX0X1E
#define OFSY0X1F
#define OFSZ0X20
#define DUR0X21
#define Latent0X22
#define Window 0X23
#define THRESH_ACK0X24
#define THRESH_INACT 0X25
#define TIME_INACT0X26
#define ACT_INACT_CTL 0X27
#define THRESH_FF0X28
#define TIME_FF0X29
#define TAP_AXES0X2A
#define ACT_TAP_STATUS 0X2B
#define BW_RATE0X2C
#define POWER_CTL0X2D
#define INT_ENABLE0X2E
#define INT_MAP0X2F
#define INT_SOURCE 0X30
#define DATA_FORMAT 0X31
#define DATA_X00X32
#define DATA_X10X33
#define DATA_Y00X34
#define DATA_Y10X35
#define DATA_Z00X36
#define DATA_Z10X37
#define FIFO_CTL0X38
#define FIFO_STATUS0X39
//0X0B TO OX1F Factory Reserved
//如果ALT ADDRESS脚(12脚)接地,IIC地址为0X53(不包含最低位).
//如果接V3.3,则IIC地址为0X1D(不包含最低位).
//因为开发板接V3.3,所以转为读写地址后,为0X3B和0X3A(如果接GND,则为0XA7和0XA6)
#define ADXL_READ 0X3B
#define ADXL_WRITE 0X3A
u8 Adxl345Init(void); //初始化ADXL345
void Adxl345WRReg(u8 addr,u8 val);//写ADXL345寄存器
u8 Adxl345ReadReg(u8 addr);//读ADXL345寄存器
void Adxl345ReadXyz(short *x,short *y,short *z); //读取一次值
void Adxl345ReadAvval(short *x,short *y,short *z); //读取平均值
void Adxl345AutoAdjust(char *xval,char *yval,char *zval);//自动校准
void Adxl345ReadAverage(short *x,short *y,short *z,u8 times);//连续读取times次,取平均
short Adxl345GetAngle(float x,float y,float z,u8 dir);
#endif
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 单片机的抗干扰措施有哪些
单片机的抗干扰措施有哪些






 APP下载
APP下载 登录
登录







