×


红外无线模块:
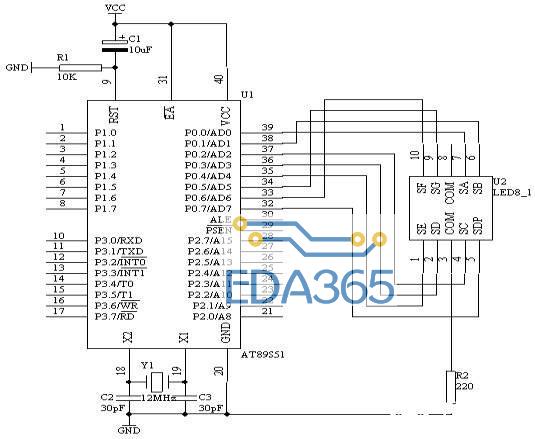
1.硬件:红外接收器+遥控器
2.连接方式:接收器的+、-分别连接在单片机的VCC、GND上面,S为信号输出端连接在单片机的IO口上面(例程里面连接在了P3^2引脚)
3.遥控器上面每一个按键对应的键码值已经在程序中给出,程序的内容是用遥控器控制单片机上面的流水灯
单片机源程序如下:
#include
#include
#define uchar unsigned char
#define uint unsigned int
sbit IRIN=P3^2; //红外接收器数据线
sbit led1=P1^0;
sbit led2=P1^1;
sbit led3=P1^2;
sbit led4=P1^3;
sbit led5=P1^4;
sbit led6=P1^5;
sbit led7=P1^6;
sbit led8=P1^7;
uchar IRCOM[7];
void delay(unsigned char x) ;
/*******************************************************************/
void main()
{
unsigned int a;
IRIN=1; //I/O口初始化
IE=0x81; //允许总中断中断,使能 INT0 外部中断
TCON=TCON|0x01; //触发方式为脉冲负边沿触发
while(1)
{
for(a=100;a>0;a--)
{
void IR_IN();
}
}
}
/**********************************************************/
void IR_IN() interrupt 0 using 0
{
unsigned char j,k,N=0;
unsigned char q=0;
EX0 = 0;
delay(15);
if (IRIN==1)
{
EX0 =1;
return;
}
//确认IR信号出现
while (!IRIN) //等IR变为高电平,跳过9ms的前导低电平信号。
delay(1);
for (j=0;j<4;j++) //收集四组数据
{
for (k=0;k<8;k++) //每组数据有8位
{
while (IRIN) //等 IR 变为低电平,跳过4.5ms的前导高电平信号。
{delay(1);}
while (!IRIN) //等 IR 变为高电平
delay(1);
while (IRIN) //计算IR高电平时长
{
delay(1);
N++;
if (N>=30)
{
EX0=1;
return;
} //0.14ms计数过长自动离开。
} //高电平计数完毕
IRCOM[j]=IRCOM[j] >> 1; //数据最高位补“0”
if(N>=8)
{
IRCOM[j] = IRCOM[j] | 0x80; //数据最高位补“1”
}
N=0;
}
}
if(IRCOM[2]!=~IRCOM[3])
{
EX0=1;
return;
}
IRCOM[5]=IRCOM[2] & 0x0F; //取键码的低四位
IRCOM[6]=IRCOM[2] >> 4; //右移4次,高四位变为低四位
if(IRCOM[5]>9)
{
IRCOM[5]=IRCOM[5]+0x37;
}
else
IRCOM[5]=IRCOM[5]+0x30;
if(IRCOM[6]>9)
{
IRCOM[6]=IRCOM[6]+0x37;
}
else
IRCOM[6]=IRCOM[6]+0x30;
q= (((IRCOM[6]&0x0f)<<4) + (IRCOM[5]&0x0f));
switch(q) //判断按键键码值
{
case 0x04:led1=1;led2=0;led3=1;led4=0;led5=1;led6=0;led7=1;led8=0;break; //(#)
case 0x19:led1=0;break; //(0)
case 0x40:led5=0;break; //(5)
case 0x43:led6=0;break; //(6)
case 0x44:led4=0;break; //(4)
case 0x45:led1=0;break; //(1)
case 0x46:led2=0;break; //(2)
case 0x47:led3=0;break; //(3)
case 0x07:led7=0;break; //(7)
case 0x18:led1=0;led2=0;led3=1;led4=1;led5=1;led6=1;led7=1;led8=1;break; //(上)
case 0x09:led1=0;led2=0;led3=0;led4=0;led5=0;led6=0;led7=0;led8=0;break; //(9)
case 0x08:led1=1;led2=1;led3=1;led4=1;led5=0;led6=0;led7=1;led8=1;break; //(左)
case 0x13:led1=1;led2=1;led3=1;led4=1;led5=1;led6=1;led7=1;led8=1;break; //(ok)
case 0x51:led1=1;led2=1;led3=1;led4=1;led5=1;led6=1;led7=0;led8=0;break; //(右)
case 0x15:led8=0;break; //(8)
case 0x52:led1=1;led2=1;led3=0;led4=0;led5=1;led6=1;led7=1;led8=1;break; //(下)
case 0x16:led1=0;led2=1;led3=0;led4=1;led5=0;led6=1;led7=0;led8=1;break; // (*)
default :break;
}
EX0 = 1;
}
/***************延时函数*****************************/
void delay(unsigned char x) //x*0.14MS
{
unsigned char i;
while(x--)
{
for (i = 0; i<13; i++) {}
}
}
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 AVR单片机中RC电容触摸的感应原理解析
AVR单片机中RC电容触摸的感应原理解析






 APP下载
APP下载 登录
登录







