×


定时器,中断这两样东西是学习一个MCU必须掌握的,也是非常有用的!
STM32的TIM一般有高级定时器TIM1,(TIM8只有在互联性产品有),普通定时器TIM2,TIM3,TIM4,(TIM5,TIM6,TIM7有点设备中没有);今天就只介绍普通定时器,因为高级定时器我还不会!每一个普通定时器都有4路通道!
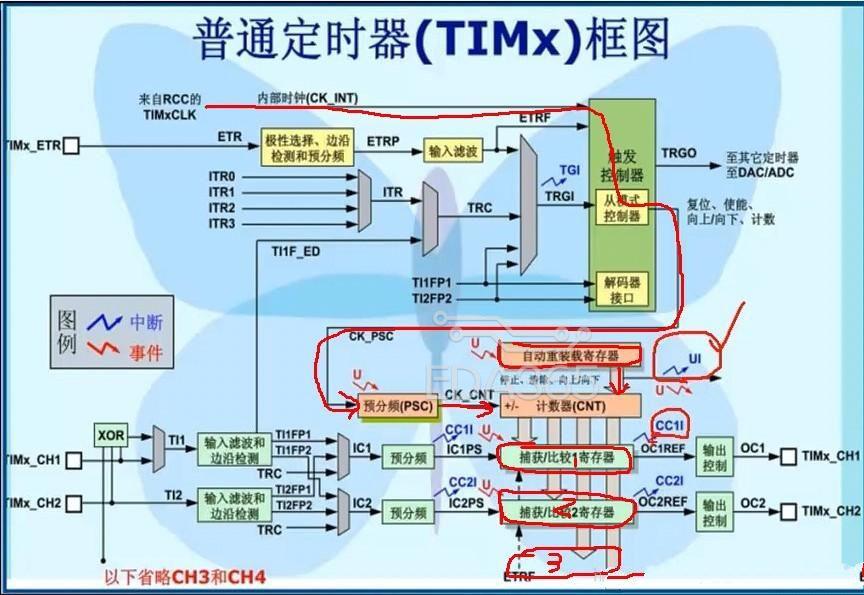
我们先看看这个逻辑图吧!我们今天先讨论讨论定时器的问题!我用红色笔标过的路线就是定时器的工作路线,时钟有内部时钟产生,到PSC哪里进行分频处理,然后CNT进行计数,上面还有一个自动重装载寄存器APP。

这个是分频器的工作原理,我们可以看,分频器设定之前分频系数为1[1],后面的[2][3][4]分频系数为2,分频系数改变后,计数周期也跟着改变了;同时预分频设置生效时,他还会产生一个中断信号,这个中断信号不要管他,一个系统时钟周期后会自动消失,跟I2C的差不多!

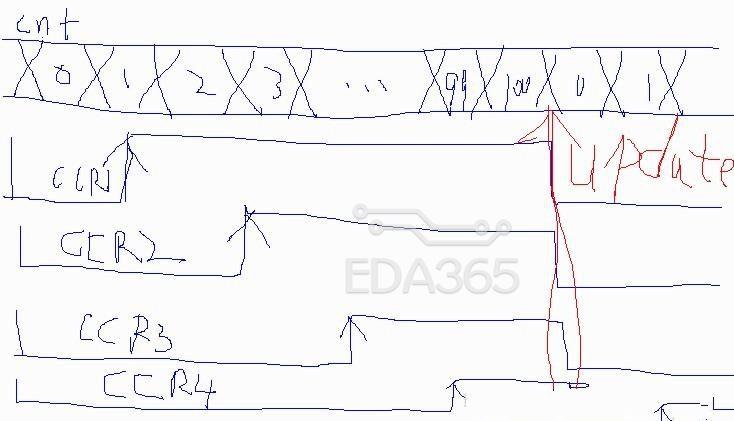
这个是计数过程,上面说过了,计数跟分频后的周期有关;当计数达到装载的数值之后,系统会产生一个三个信号,其中溢出信号和更新事件一个时钟周期后会自动消失,而这时候触发了更新中断标志位UIF,我们可以用这个UPDATE来做定时器的中断标志信号!
TIM_ITConfig(TIM2, TIM_IT_UPDATE, ENABLE);
另外还有4个中断,我们知道PWM的产生把,他就跟PWM的产生有着血缘关系!
如果我们在OC模式选择的时候,TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing;选择了Timing那么我们就可以做定时器了。
有时候我们会发现当UPdate中断信号产生时,其他四个中断信号也产生,什么原因呢?因为我们在设置tim.TIM_Period = period;时,period时间太短,就错觉的以为他们是一群产生中断信号的!来我们分析下:
假设分频因子为71,即72分频,PCLK为72M,我们设置的周期为1000;那么我们产生定时器的Upddate信号频率为1000Hz,周期为1ms,假设我们这里设置的CCR1 = 100;CCR2 = 500;CCR3 = 600;CCR4 = 900;
那么update信号产生后0.1ms产生CCR1的中断信号,0.5ms后产生CCR2的中断信号,0.6ms后产生CCR3的中断信号,这些中断标志位是:
#define TIM_FLAG_Update ((uint16_t)0x0001)
#define TIM_FLAG_CC1 ((uint16_t)0x0002)
#define TIM_FLAG_CC2 ((uint16_t)0x0004)
#define TIM_FLAG_CC3 ((uint16_t)0x0008)
#define TIM_FLAG_CC4 ((uint16_t)0x0010)
#define TIM_FLAG_COM ((uint16_t)0x0020)
#define TIM_FLAG_Trigger ((uint16_t)0x0040)
#define TIM_FLAG_Break ((uint16_t)0x0080)
#define TIM_FLAG_CC1OF ((uint16_t)0x0200)
#define TIM_FLAG_CC2OF ((uint16_t)0x0400)
#define TIM_FLAG_CC3OF ((uint16_t)0x0800)
#define TIM_FLAG_CC4OF ((uint16_t)0x1000)
[OF为溢出]后面做研究!
对于这些CCR1在定时方面的应用我还没有想出什么好的点子,但是他确实存在,如果想验证的话,我们可以把周期设置长一点,比如设置为1s,然后通过设置CCR的值,来看看效果,呵呵,不过这是不容易实现的,因为CCRx 最大为0xffff = 65535跟72M比比,还能说什么?好吧,谁有什么好办法,可以跟我说下!
void tim_init(u32 period,u32 psc)
{
TIM_TimeBaseInitTypeDef tim;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
tim.TIM_Period = period;
tim.TIM_Prescaler = psc;
tim.TIM_ClockDivision = 0;
tim.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &tim);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = 1*period/4;
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_OCInitStructure.TIM_Pulse = 2*period/4;
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_OCInitStructure.TIM_Pulse = 3*period/4;
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_ITConfig(TIM2, TIM_IT_CC2|TIM_IT_CC3|TIM_IT_CC4, ENABLE);
TIM_Cmd(TIM2,ENABLE);
/* Enable the TIM2 global Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void TIM2_IRQHandler(void)
{
static u32 cc2 = 0,cc3 = 0,cc4 = 0,cc5 = 0;
static u8 flag2 = 0,flag3 = 0,flag4 = 0,flag5 = 0;
u32 capture;
if(TIM_GetFlagStatus(TIM2,TIM_FLAG_CC2) == SET)
{
cc2 ++;
if(cc2 > 1000)
{
flag2 = ~flag2;
if(flag2) led_on(4);
else led_off(4);
cc2 = 0;
}
TIM_ClearFlag(TIM2,TIM_FLAG_CC2);
capture = TIM_GetCapture2(TIM2);
TIM_SetCompare2(TIM2, capture + 255);
}
if(TIM_GetFlagStatus(TIM2,TIM_FLAG_CC3) == SET)
{
cc3 ++;
if(cc3 > 1000)
{
flag3 = ~flag3;
if(flag3) led_on(5);
else led_off(5);
cc3 = 0;
}
TIM_ClearFlag(TIM2,TIM_FLAG_CC3);
capture = TIM_GetCapture3(TIM2);
TIM_SetCompare3(TIM2, capture + 500);
}
if(TIM_GetFlagStatus(TIM2,TIM_FLAG_CC4) == SET)
{
cc4 ++;
if(cc4 > 1000)
{
flag4 = ~flag4;
if(flag4) led_on(6);
else led_off(6);
cc4 = 0;
}
TIM_ClearFlag(TIM2,TIM_FLAG_CC4);
capture = TIM_GetCapture4(TIM2);
TIM_SetCompare4(TIM2, capture + 725);
}
if(TIM_GetFlagStatus(TIM2,TIM_FLAG_Update) == SET)
{
cc5 ++;
if(cc5 > 1000)
{
flag5 = ~flag5;
if(flag5) led_on(7);
else led_off(7);
cc5 = 0;
}
TIM_ClearFlag(TIM2,TIM_FLAG_Update);
}
}
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 单片机的抗干扰措施有哪些
单片机的抗干扰措施有哪些






 APP下载
APP下载 登录
登录







