×


1 引言
随着经济发展,汽车数量急剧增加,城市道路日渐拥挤,交通拥塞已成为一个国际性的问题。因此,设计可靠、安全、便捷的多功能交通灯控制系统有极大的现实必要性。通常情况下,交通信号灯控制主要有两个缺陷:1、车道放行车辆时,时间设定相同且固定,十字路口经常出现主车道车辆多,放行时间短,车流无法在规定时间内通过,而副车道车辆少,放行时间明显过长;2、未考虑急车强通(譬如,消防车执行紧急任务时,两车道都应等待消防车通过)。由于交通信号灯控制系统缺乏有效的应急措施,导致十字路口交通受阻,造成不必要的经济损失。
本系统利用单片机AT89C51,借助CAN总线作为现场通信总线实现智能交通信号灯控制系统设计,实现了根据区域车流、红外遥控以及PC机进行十字路口交通信号灯智能控制,并在软、硬件方面采取一些改进措施,实现了根据十字路口车流、红外遥控进行交通信号灯智能控制,使交通信号灯现场控制灵活、有效。从一定程度上解决了交通路口堵塞、车辆停车等待时间不合理、急车强通等问题。系统具有结构简单、可靠性高、成本低、实时性好、安装维护方便等优点,有广泛的应用前景。
2 设计方案与系统结构
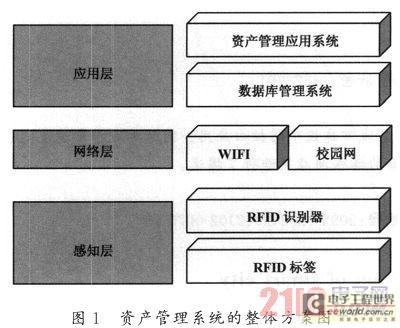
本智能交通信号灯控制系统硬件主要由车流信息检测电路、键盘时间设置电路、红外遥控发射/接收电路、单片机控制器、CAN总线控制器、CAN总线收发器、光电隔离芯片、单片机并行接口、看门狗电路等电路组成。本系统设置与上位PC机相连的上位节点为主节点,各路口信号灯控制装置为底层节点,共同构成区域交通信号灯控制系统。系统原理框图如图1所示。
系统利用红外遥控装置实现各十字路口现场信号灯控制,红外发射器发射出的编码信号经接收器接收后送入单片机控制器,控制信号灯红绿变换、等待时间、急车强通。另外,车流检测装置安放在各十字路口东西、南北道路方向实时检测车道车流信息。并将检测到的信息输至单片机进行处理,通过单片机编程技术实现信号灯绿、红切换及等待时间设定。此外,PC机通过通讯串口与节点上的单片机控制器进行通信,实现数据信息在CAN总线上的发送与接收。PC机负责网络上所有信号灯控制装置的集中管理功能;同时向各信号灯控制器下传工作模式控制信息。[page]
3 系统设计
3.1 红外遥控发射电路
由于系统需实现十字路口不同方向信号灯变化。假设两方向为东西、南北方向。则需实现东西、南北两个方向信号灯的选定、时间增减、急车强通等功能。红外遥控发射电路原理框图如图2所示。
红外遥控发射器与外接陶瓷谐振器、电容器组成振荡电路,分频产生一定脉冲宽度的载频信号。输出编码信号,经达林顿管放大后,驱动红外线发射二极管向外发射。
3.2 红外遥控接收电路
红外接收、解调模块接收来自发射器的红外信号,经内部集成电路放大、解调后,由输出端输出编码脉冲信号,经三极管反相放大后,送至接收器,由接收器解调模块进行译码。当发射器相应键按下时,接收器输出高电平信号,通过或非门接入单片机控制器的外中断,申请中断,由中断服务程序检测键按下状态,从而完成相应的中断服务。红外接收器与单片机控制器接口电路如图3所示。
3.3 CAN总线节点接口电路
各路口交通信号灯控制器与上位机的通讯都通过各自的CAN总线接口模块完成。总线系统节点硬件电路原理框图如图4所示。
单片机控制器负责CAN总线控制器初始化,控制实现数据的接收和发送等通信任务。CAN总线收发器与CAN总线接口部分采用了一定的安全和抗干扰措施。为增强CAN总线节点的抗干扰能力,CAN控制器不直接与CAN收发器相连,而是通过加接高速光电隔离器芯片,实现总线上各节点间的电气隔离。但是,光耦电路所采用的VCC和VDD电源必须完全隔离,否则采用光耦电路就失去了意义,可采用小功率电源隔离模块或不大于5V隔离输出开关电源模块实现。
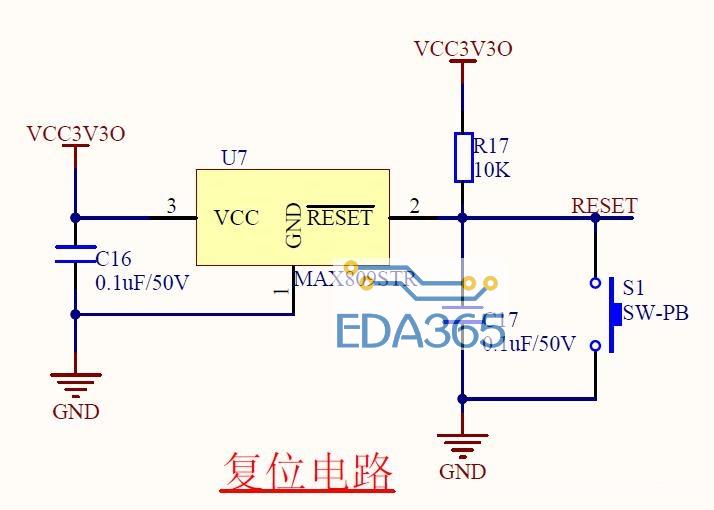
3.4 看门狗电路
由于单片机控制器自身抗干扰能力较差,尤其在一些条件比较恶劣、噪声大的场合,常会出现单片机因受外界干扰轻者导致系统内部数据出错,重者将严重影响程序的运行而死机,造成系统不能正常工作。设置看门狗是为了防止单片机死机、提高单片机系统抗干扰性的一种重要途径。考虑系统可靠性设计,满足苛刻环境下的正常运行,本设计中采用硬件看门狗电路。电路原理框图如图5所示。
通过硬件看门狗电路设计,可有效防止运行程序进入“死循环”。保证系统不受恶劣天气及环境条件造成的干扰。
3.5 分布式检测控制系统
[page]
由于CAN总线具有较强的抗干扰能力,通讯中没有地址的概念及节点数不受限制等优点,已经被广泛应用于汽车、数控机床、仪器仪表、现场总线控制等领域[1]。本设计将若干智能交通信号灯控制器、上位节点接口和PC机组成CAN总线通信系统方便实现智能分布式区域信号灯实时监控、高速数据采集等。单片机控制器与PC机实现串行通信,设置CAN总线控制器工作在Intel模式,由PC机发送数据写入单片机控制器,再通过控制信号由单片机将数据写入CAN总线控制器并通过CAN总线收发器发送。接收数据通过中断进行,CAN BUS数据经CAN总线收发器接收并写入CAN总线控制器。然后通过中断提请单片机读取数据上传PC机。
关键字:单片机 交通灯智能控制
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 用PIC16F627制作的可调倒计时提醒器
用PIC16F627制作的可调倒计时提醒器








 APP下载
APP下载 登录
登录







