×


外部中断机制
本章我们仍然是通过按键来控制LED,只不过实现方式由轮询变为了外部中断。为什么需要外部中断?为了给CPU减轻负担。
举个例子
比如你今天有个快递,快递一般放在前台或是门卫。你有两种方法,1、不停问前台,你的快递到了没有;2、等快递到了,让前台告诉你。
前者就是轮询,后者就是外部中断。
外部中断是由引脚检测到的中断。中断可以由上升沿、下降沿或双边沿触发。换句话说,中断不是由CPU去“询问”,而是由中断控制器“通知”的。
ARM的体系架构决定了处理器是执行完当前指令后再去检查是否有中断发生。
硬件:中断源->中断控制器筛选->CPU核保存当前工作状态,跳到对应异常向量表
软件:根据中断号,执行对应中断服务程序,执行完毕恢复各类寄存器值,并返回。
中断向量表,基本上所有的外设,都有中断。所以中断很重要
属于外部中断的线共有16条,引脚数量多于16,所以引脚要共用外部中断线。
中断允许嵌套,不同的中断有不同的优先级,高优先级的中断可以打断低优先级的中断。
从理论上来讲,STM32F4有16级中断优先级。习惯上,以前的工程师会把优先级分为抢占优先级和子优先级,两者共用一个4位的寄存器。同抢断优先级的互不打断。同抢占优先级且同时发生的中断,才看子优先级。可以看出子优先级功能过于鸡肋,我并不习惯使用子优先级,所以设置抢占优先级有16位。
使用CubeMX配置外部中断
配置引脚
我们仍配置按键为外部中断输入源,所以把引脚PA4-PA7配置为外部中断。然后设置为上拉输入,下降沿触发。
配置中断优先级
在NVIC中使能外部中断,并分配优先级。
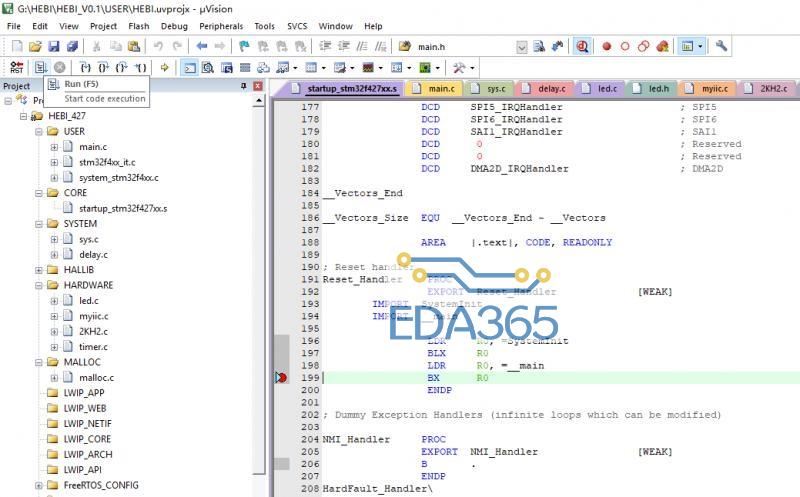
查看生成的代码
static void MX_GPIO_Init(void)
{
/*Configure GPIO pins : PA4 PA5 PA6 PA7 */
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI4_IRQn, 14, 0);
HAL_NVIC_EnableIRQ(EXTI4_IRQn);
HAL_NVIC_SetPriority(EXTI9_5_IRQn, 15, 0);
HAL_NVIC_EnableIRQ(EXTI9_5_IRQn);
}
另外,也配置了中断处理函数。
EXTI4_IRQHandler函数是谁调用的?汇编程序,或者说是硬件调用的,硬件决定CPU每执行完一条指令,都会查询是否产生中断。发生中断的时候,会产生一条跳转指令,跳去别的地方执行函数。一条指令显然是没办法处理完中断的,所以这一条指令只能实现跳转功能,跳转到其它函数。EXTI4_IRQHandler函数没有声明,也不需要C调用,汇编为它分配了空间,至于谁赋予了HAL_GPIO_EXTI_IRQHandler参数,就是另外一个问题了。
外部中断处理机制分析
可以看出,这几个外部中断都使用了同一个处理函数,HAL_GPIO_EXTI_IRQHandler,通过传入不同的参数,来区分是哪一条中断线触发的中断。不同的外部中断都调用了同一个HAL库的处理函数:HAL_GPIO_EXTI_IRQHandler。
而在HAL_GPIO_EXTI_IRQHandler的处理函数中,又调用了一个名为HAL_GPIO_EXTI_Callback的回调函数。此回调函数是用户编写业务逻辑的函数。
在计算机程序设计中,回调函数,或简称回调(Callback 即call then back
被主函数调用运算后会返回主函数),是指通过函数参数传递到其它代码的,某一块可执行代码的引用。这一设计允许了底层代码调用在高层定义的子程序。
我们注意到,在用户重定义的处理函数名称之前,有__Weak标记,这是为什么?在HAL库中采用了一种弱函数机制,在HAL_GPIO_EXTI_Callback函数前有个__weak标记,表明这是个弱函数。弱函数可以被用户定义的同名函数覆盖,也就是说,如果用户定义了一个函数名为HAL_GPIO_EXTI_Callback,系统就不再编译有weak标记的函数,所以,被weak标记的,都是备胎。__weak在回调函数的时候经常用到。这样的好处是,系统默认定义了一个空的回调函数,保证编译器不会报错。同时,如果用户自己要定义用户回调函数,那么只需要重新定义即可,不需要考虑函数重复定义的问题
外部中断处理函数
我把代码填写到IO.c中,业务处理逻辑与按键扫描一样,当检测到按键时,LED状态变化。回调函数中无需处理中断标志位,是因为此项工作已经由HAL_GPIO_EXTI_IRQHandler完成。主函数的死循环中,不处理任何业务,所以什么都不用填写,甚至,可以让芯片进入休眠模式。
//IO.c
/**
* @brief 外部中断函数处理
* @param GPIO_Pin:中断引脚号
* @retval None
*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)
{
case GPIO_PIN_7: LED1 = !LED1; break;
case GPIO_PIN_6: LED2 = !LED2; break;
case GPIO_PIN_5: LED1 = !LED2;break;
case GPIO_PIN_4: LED2 = !LED1;break;
default: break;
}
}
为什么外部中断4是独立的处理函数,而外部中断5-9要共享一个处理函数?
可能是历史原因,之前的STM32单片机资源比较少,所以5-9共享处理函数。
关键字:HAL库 外部中断 控制LED『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 51单片机中断源的扩展方法
51单片机中断源的扩展方法







 APP下载
APP下载 登录
登录







