1.如何使用定时器的捕捉功能。
简介:输入捕捉功能在频率(或周期)、脉冲宽度测量的应用中非常有用。
#define FOSC 80E6 //定义主系统时钟为80M
#define PB_DIV 8 //定义系统外设分频器为8
#define PRESCALE 8 // 定义定时器分频器为256
#define MSEC 10E-3
#define T1_TICK (500 * MSEC * FOSC)/(PB_DIV * PRESCALE)
/**********************************************************************************************
*函数名 字: TIMER3_InputCapture_Config
*功能描 述: 定时器3用于输入捕捉功能
*输 入: 无
*输 出: 无
*返 回: 无
*全局变量: 无
*调用模块: 使用内部8M时钟,倍频到80M, 外设时钟为主时钟8分频,为10M
**-------------------------------------------------------------------------
***********************************************************************************************/
void TIMER3_InputCapture_Config()
{
unsigned int CaptureTime;
//Clear interrupt flag
mIC1ClearIntFlag();
// 建立定时器3
OpenTimer3(T3_ON | T3_PS_1_1, T3_TICK);
//配置Capture1的中断(中断开启,中断优先级)
ConfigIntCapture1(IC_INT_ON | IC_INT_PRIOR_4 | IC_INT_SUB_PRIOR_3);
// 使能输入捕捉模块1
// 捕捉每个边沿
// 使能捕捉中断
// 使用定时器3作为测量基准
//第一次以扑捉下降沿开始
OpenCapture1( IC_SP_EVERY_EDGE | IC_INT_1CAPTURE | IC_TIMER3_SRC | IC_FEDGE_FALL | IC_ON ); INTEnableSystemMultiVectoredInt()
}
inputCapture配置说明:
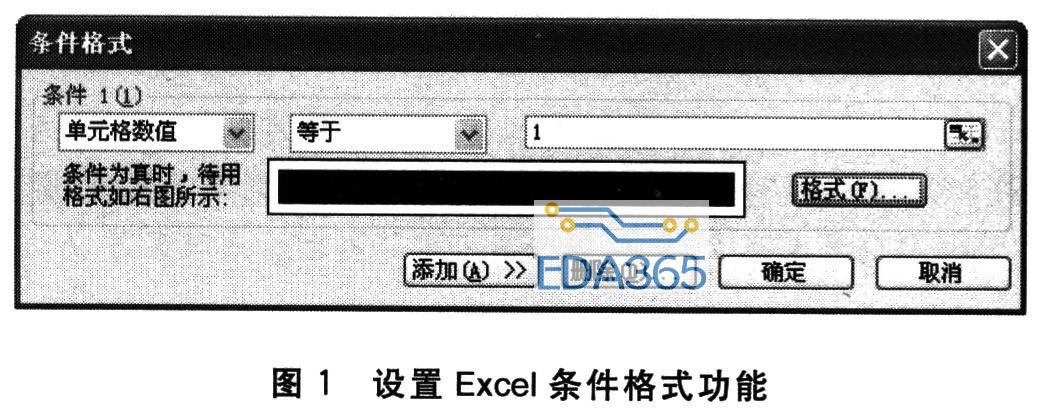
如图1所示,笔者需要测试的信号为从第一个下降沿开始之后每一个边沿的时间,这个设置可以通过写入“IC_FEDGE_FALL”关键字实现,问题就出在在,仅仅按照这个字面意思写入是不够的,仔细阅读数据手册时会发现,要实现这样的功能必须设置输入捕捉的工作模式为“ IC_SP_EVERY_EDGE”,如图2括号内说明,及图3模式说明。
图 1
图 2
/**********************************************************************************************
*函数名 字:_InputCapture1(void)
*功能描 述: 输入捕捉1中断处理函数
*输 入: 无
*输 出: captime[10]:捕捉到的边沿时间值
*返 回: 无
*全局变量: 无
*调用模块:
***********************************************************************************************/
void __ISR(5, ipl4) _InputCapture1(void)
{
int16u CaptureTime;
int8u time;
//读取IC1BUF内的数值
captime[captime_number++] = mIC1ReadCapture(); //IC1BUF;
//清除中断标志
mIC1ClearIntFlag();
}
说明:
1.中断函数怎么写,第一步在中断向量表(中断向量表在数据手册里有详细列出)里找到输入捕捉的中断号为“5”,
第二步定义优先级为ipl4(注意是"L"的小写+4),第三部自定义函数名字 _InputCapture1(void),自己好记就行。
void __ISR(5, ipl4) _InputCapture1(void)
{
//things to do....
}
2.中断内部处理
经过笔者调试,应先读取IC1BUF内的数据,然后再清中断标志。如果先清中断标志再读ICBUF会产生读出的ICBUF与实际应该得到的数据对不上的情况,具体原因不知。
参考文献:①《C32 C Lib Guide》
②《C32 peripheral Lib Guide》
文档路径 -- MPLAB IDE v8.53 -->help--> Topics--> C32 Compiler -- >C32 C Lib Guide[PDF]
-- MPLAB IDE v8.53 -->help--> Topics--> C32 Compiler -- >C32 peripheral Lib Guide
③《PIC32MX5XX6XX7XX-EN.PDF》-- microchip 官网










 热门文章
更多
热门文章
更多

 TQ210天嵌开发板S5PV210 LED闪烁程序C语言代码记录
TQ210天嵌开发板S5PV210 LED闪烁程序C语言代码记录







 APP下载
APP下载 登录
登录







