×


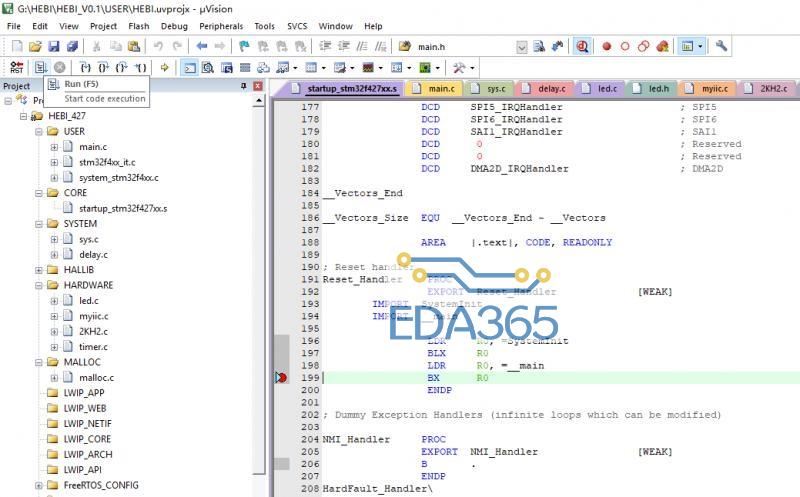
研究了一下KEIL的MDK以及它的文档
一般习惯性的都从串口开始做 hello world!
总结一下,KEIL的入门要比arduino要复杂的多,arduino是为硬件小白及非专业人士准备的。但是它的功能并不弱。
KEIL入门请一定要认真花点时间看一下它的文档,我是用这份文档入门的(http://www2.keil.com/docs/default-source/default-document-library/mdk5-getting-started.pdf?sfvrsn=0)
原以为找个hello world例子就可以轻松入门,后来发现错了。所以认认真真去看完了上面的文档。
不多说了,上面的文档很专业,看完就足够入门了。
我把例子放给大家,官方的例子在我的板子上运行有问题(只能发送一次),做了一些改动
#include "Driver_USART.h"
extern ARM_DRIVER_USART Driver_USART2;
/*----------------------------------------------------------------------------
* Application main thread
*---------------------------------------------------------------------------*/
void myUART_Thread(void const *argument);
osThreadId_t tid_myUART_Thread;
osEventFlagsId_t evt_id ;
#define FLAGS_MSK1 0x00000001ul
void myUSART_callback(uint32_t event)
{
// uint32_t mask; 以下几行原有代码被注释掉
// mask = ARM_USART_EVENT_RECEIVE_COMPLETE |
// ARM_USART_EVENT_TRANSFER_COMPLETE |
// ARM_USART_EVENT_SEND_COMPLETE |
// ARM_USART_EVENT_TX_COMPLETE ;
//if (event & mask)
{
/* Success: Wakeup Thread */
if( event & ARM_USART_EVENT_TX_COMPLETE )//新增加代码
osEventFlagsSet(evt_id, ARM_USART_EVENT_TX_COMPLETE);
if( event & ARM_USART_EVENT_RECEIVE_COMPLETE )
osEventFlagsSet(evt_id, ARM_USART_EVENT_RECEIVE_COMPLETE);
//osEventFlagsSet(evt_id, FLAGS_MSK1);
}
// if (event & ARM_USART_EVENT_RX_TIMEOUT) {
// __breakpoint(0); /* Error: Call debugger or replace with custom error handling */
// }
// if (event & (ARM_USART_EVENT_RX_OVERFLOW | ARM_USART_EVENT_TX_UNDERFLOW)) {
// __breakpoint(0); /* Error: Call debugger or replace with custom error handling */
// }
}
void app_main (void *argument) {
static ARM_DRIVER_USART * USARTdrv = &Driver_USART2;
ARM_DRIVER_VERSION version;
ARM_USART_CAPABILITIES drv_capabilities;
char cmd;
#ifdef DEBUG
version = USARTdrv->GetVersion();
if (version.api < 0x200) /* requires at minimum API version 2.00 or higher */
{ /* error handling */
return;
}
drv_capabilities = USARTdrv->GetCapabilities();
if (drv_capabilities.event_tx_complete == 0)
{ /* error handling */
return;
}
#endif
/*Initialize the USART driver */
USARTdrv->Initialize(myUSART_callback);
/*Power up the USART peripheral */
USARTdrv->PowerControl(ARM_POWER_FULL);
/*Configure the USART to 4800 Bits/sec */
USARTdrv->Control(ARM_USART_MODE_ASYNCHRONOUS |
ARM_USART_DATA_BITS_8 |
ARM_USART_PARITY_NONE |
ARM_USART_STOP_BITS_1 |
ARM_USART_FLOW_CONTROL_NONE, 4800);
/* Enable Receiver and Transmitter lines */
USARTdrv->Control (ARM_USART_CONTROL_TX, 1);
USARTdrv->Control (ARM_USART_CONTROL_RX, 1);
evt_id = osEventFlagsNew(NULL);
USARTdrv->Send("nPress Enter to receive a message", 34);
//osSignalWait(0x01, osWaitForever);
osEventFlagsWait(evt_id,ARM_USART_EVENT_TX_COMPLETE,osFlagsWaitAny, osWaitForever);//修改过
while (1)
{
cmd = 0;//新增
USARTdrv->Receive(&cmd, 1); /* Get byte from UART */
osEventFlagsWait(evt_id,ARM_USART_EVENT_RECEIVE_COMPLETE,osFlagsWaitAny,osWaitForever);//修改过
if (cmd == 13) /* CR, send greeting */
{
USARTdrv->Send("nHello World!", 12);
osEventFlagsWait(evt_id,ARM_USART_EVENT_TX_COMPLETE,osFlagsWaitAny,osWaitForever);//修改过
}
}
}
PC端运行截图如下:
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 51单片机中断源的扩展方法
51单片机中断源的扩展方法







 APP下载
APP下载 登录
登录







