
使用stm32的CAN通信:
1.初始化,
1) 包括引脚初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2)初始化:CAN主控制寄存器CAN_MCR配置,

对于INRQ位,在CAN进行初始化时,先要将其设置为1,进入初始化模式,然后进行初始化(包括CAN_MCR与CAN_BTR的设置),设置完以后,再将其设置为0,进入正常工作模式。
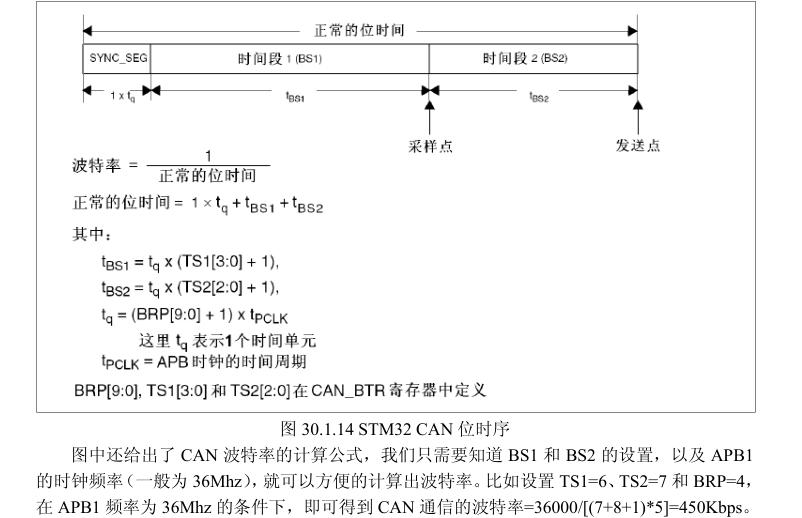
CAN位时序寄存器(CAN_BTR)配置,设置其波特率,波特率计算如下图所示:
CANx->MCR |= CAN_MCR_INRQ ; (先进入初始化模式)
CANx->MCR &= ~(uint32_t)CAN_MCR_TTCM;
CANx->MCR |= CAN_MCR_ABOM;
........
CANx->MCR &= ~(uint32_t)CAN_MCR_INRQ;(进入正常工作模式)
3)CAN滤波器设置

设置该寄存器时,先将 FINIT置1,进入初始化模式,对 STM32F103ZET6 来说,只有[13:0]这 14 个位有效。
4)CAN发送邮箱标识符寄存器CAN_TIxR
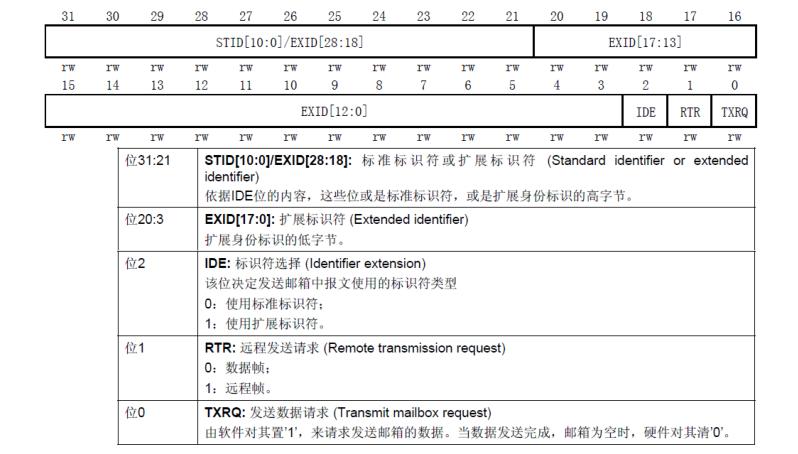
发送邮件时,先设置是标准还是扩展标识符,设置标识符,数据长度(发送邮箱长度和时间戳寄存器CAN_TDTxR),判断哪个邮箱为空,然后将TXRQ置1(发送完毕后,硬件自动置0),然后设置ID,将数据分别存入发送邮箱高字节与低字节邮箱,请求发送邮箱。
TxMessage.ExtId=0x12; //初始化设置
TxMessage.IDE=0;
TxMessage.RTR=0;
TxMessage.DLC=len;
if ((CANx->TSR&CAN_TSR_TME0) == CAN_TSR_TME0) //判断哪个邮箱为空
{
transmit_mailbox = 0;
}
else if ((CANx->TSR&CAN_TSR_TME1) == CAN_TSR_TME1)
{
transmit_mailbox = 1;
}
else if ((CANx->TSR&CAN_TSR_TME2) == CAN_TSR_TME2)
{
transmit_mailbox = 2;
}
else
{
transmit_mailbox = CAN_TxStatus_NoMailBox;
}
CANx->sTxMailBox[transmit_mailbox].TIR &= TMIDxR_TXRQ; //请求发送邮箱
if (TxMessage->IDE == CAN_Id_Standard) //发送ID
{
assert_param(IS_CAN_STDID(TxMessage->StdId));
CANx->sTxMailBox[transmit_mailbox].TIR |= ((TxMessage->StdId << 21) | TxMessage->RTR);
}
else
{
assert_param(IS_CAN_EXTID(TxMessage->ExtId));
CANx->sTxMailBox[transmit_mailbox].TIR |= ((TxMessage->ExtId << 3) | TxMessage->IDE | TxMessage->RTR);
}
CANx->sTxMailBox[transmit_mailbox].TDLR = (((uint32_t)TxMessage->Data[3] << 24) | //发送数据
((uint32_t)TxMessage->Data[2] << 16) |
((uint32_t)TxMessage->Data[1] << 8) |
((uint32_t)TxMessage->Data[0]));
CANx->sTxMailBox[transmit_mailbox].TDHR = (((uint32_t)TxMessage->Data[7] << 24) |
((uint32_t)TxMessage->Data[6] << 16) |
((uint32_t)TxMessage->Data[5] << 8) |
((uint32_t)TxMessage->Data[4]));
5)接收邮箱
跟发送邮箱差不多,先判断其为标准或扩展标识符,然后获取标识符,如果要获取特定标识符的信息的话,在此加一判断既可,然后再获取数据的长度等信息,再将数据从接收FIFO邮箱低字节与高字节寄存器去除既可。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 stm32f4 - 时钟树分析配置
stm32f4 - 时钟树分析配置







 APP下载
APP下载 登录
登录







