×


1 引言
UPS主要由蓄电池、充放电电路、逆变电路和控制系统等几部分组成,其中逆变电路及其控制系统是UPS电源的核心部分。单相UPS逆变器的被控量是50 Hz的交流量,而PI调节器不能对交流量实现无静差调节,要减小稳态误差,必须提高比例增益,但过高的比例增益,会降低系统的稳定性,因此PI控制算法不适合控制交流量。根据内模原理,要实现无静差控制,控制环前向通道上必须含有外部输入量的动态模型。重复控制算法能根据被控对象,在控制环的前向通道上形成被控对象的内模,从而实现对交流量的无静差控制。采用重复控制策略控制单相正弦波逆变器能得到较满意的性能,但算法较复杂,实现也较困难。单相逆变器的多环控制策略与双环控制策略相比,逆变器输出电压的波形有所改善,但仍存在静态误差。文献研究了单相逆变器的比例谐振控制算法,但没有考虑负载变化对系统的影响。针对以上问题,这里提出了基于比例谐振控制的多环控制策略。实验结果表明,与其他单相逆变器的控制策略相比,该控制方案是一种理想的控制方案。
2 单相UPS逆变器工作原理及数学模型
所研究的单相UPS逆变器采用单相全桥拓扑结构,如图1所示。
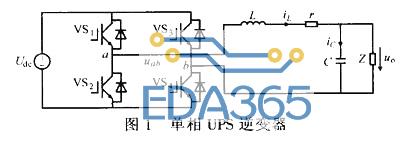
图中负载可为线性负载或非线性负载。对单相逆变器的4个IGBT开关VS1~VS4进行调制,将直流电压Udc调制成PWM脉冲电压,通过LC滤波器滤除高频谐波,在输出端得到幅值和频率都可调的正弦波电压。设m为调制度,根据电路定律,单相逆变器的数学模型为:


[page]3.1 电流调节器设计
图3示出电流环控制框图。电流调节器采用比例调节器,Gci(s)=kip。电流环必须具有较高的动态性能,所以动态特性指标设定为:调整时间ts≤2 ms,最大超调量Mp<20%,上升时间tr≤0.3 ms。为有效抑制开关频率附近(10 kHz及以上)的谐波,电流环截止频率应小于2kHz;为跟踪50 Hz的电流指令,电流环截止频率要大于500 Hz,因此电流环截止频率选择在500 Hz~2 kHz之间。


由图4b可得:tr=0.38 ms,tr=1.2 ms,Mp=10%,系统动态性能指标基本满足要求。此时电流环的幅值裕度为15.9 dB,相位裕量为56.2°,表明电流环具有良好的相对稳定性。
3.2 电压调节器设计
电压调节器为比例谐振调节器,传递函数为:

截止频率ω、比例系数Kp、谐振系数K,决定调节器的特性。ωc决定了调节器的带宽,减小ωc,可使调节器带宽变窄,带宽变窄后,调节器对控制信号的频率非常敏感,当频率等于ω0时,产生无穷大的增益,此时可实现无静差控制;当频率在ω0附近时,增益较小,不能实现无静差控制;当增加Kp,频带以外的幅值增加,而谐振频率处的幅值增幅不大,说明Kp对谐振环节无影响;随着Kr的增加,谐振频率以外的幅值几乎不变,但谐振频率处的幅值增幅相对明显,此特点有利于消除静态误差。Kp,Kr的变化,对谐振频率处的相位影响都很小。
根据图2可得逆变器输出电压为:

由式(3)可知,uo与指令电压uref负载电流io都有关。由于Gu在谐振频率附近有足够大的增益,故式(3)中第1项的值趋近于uref,而第2项的值趋近于零,即只要合理地整定调节器的参数,uo即可准确跟踪uref,此时系统具有较高的抗干扰特性。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 可编程逻辑便携式设备多节锂电池管理
可编程逻辑便携式设备多节锂电池管理






 APP下载
APP下载 登录
登录







