一期总投资5亿,出场即“巅峰”,这家EDA公司凭什么立足?
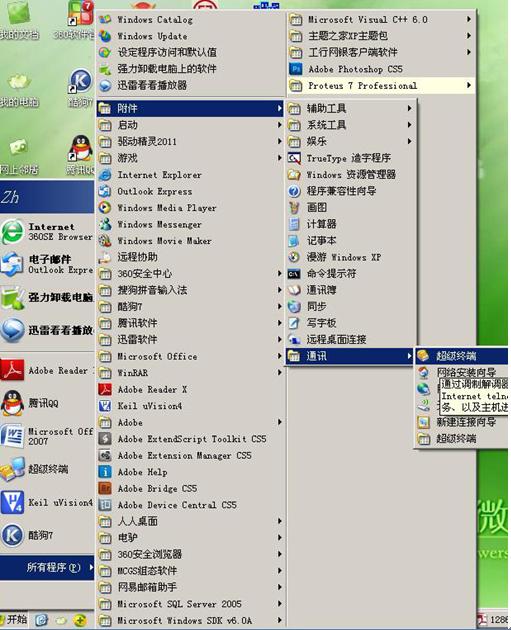
利用超级终端实现单片机与电脑通讯 利用超级终端实现单片机与电脑通讯 超级终端的设置步骤如上图所示.下面是单片机的硬件连接电路: 单片机C程序:#includevoid int_initial()//串口中断初始化{ EA=1; ES=1;}void RS232_recei
c51脉宽测量法实现无线遥控解码 #include#define uchar unsigned char#define uint unsigned int#define _rlcar_(RX) CY=RX0x80 //编译后生成带进位左移指令uchar bdata wx_data0,wx_data1,wx_data2; //存储24位无线数据uchar data wx_
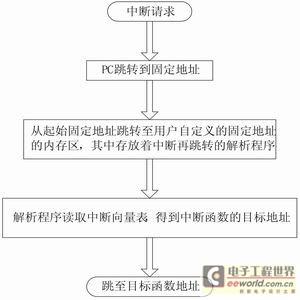
ARM处理器中断处理的编程实现 ARM处理器中断处理的编程实现arm编程特别是系统初始化代码的编写中通常需要实现中断的响应.解析跳转和返回等操作.以便支持上层应用程序的开发.而这往往是困扰初学者的一个难题.中断处理的编程实现需要深入了解ar
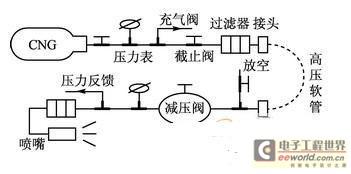
一种采用AVR单片机的天然气发动机系统设计 1 燃料供给系统 对原机的改造主要是燃料供应及喷射系统的改造.用一套完整的天然气供给系统和电控系统来实现改造目的.所使用的天然气是由高压气瓶(CNG)提供的压缩天然气. 出口压力达到20 MPa.图1所示为供气
S3C2440的汇编中常用的位置无关和位置相关指令 看了一段时间的S3C2440的bootloader后.感觉在bootloder程序中经常会用到B.BL指令.他们是位置无关的代码.指令中所跳转的目标地址用基于当前PC的偏移量来表示.与链接时分配给地址标号的绝对地址值无关.因而代码
51单片机的keil配置方法 1. data --- 可寻址片内rambdata --- 可位寻址的片内ram idata --- 可寻址片内ram.允许访问全部内部rampdata --- 分页寻址片外ram (MOVX @R0) (256 BYTE/页) xdata ---
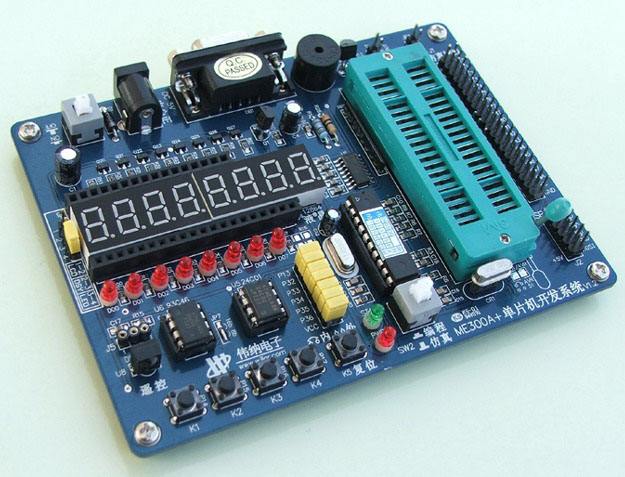
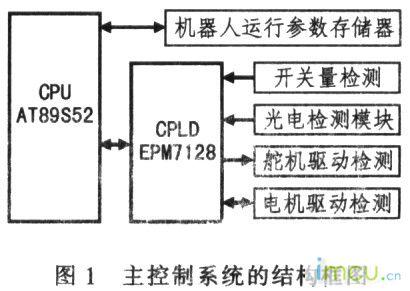
单片机机器人设计 1 引言 轮式移动机器人是机器人研究领域的一项重要内容.它集机械.电子.检测技术与智能控制于一体.在各种移动机构中.轮式移动机构最为常见.轮式移动机构之所以得到广泛的应用.主要是因为容易控制其移动速度


 APP下载
APP下载 登录
登录