1 引言
电压型PWM整流器具有网侧电流为正弦、网侧功率因数可控、电能双向传输、动态性能较快等优点,因此在有源电力滤波、统一潮流控制器、超导磁能储能等很多领域均有广泛应用。
PWM整流器最常用的控制方式是基于电网电压矢量定向的PI控制。为了得到良好的动态性能和解耦控制,需引入前馈补偿项,影响了控制系统的鲁棒性。由于内模控制具有良好的跟踪性能和较高的稳态精度,在静止坐标系下不存在耦合项和前馈补偿项;滑模控制具有鲁棒性强、对负载扰动有很好的适应性的优点,因此这里提出了一种新的PWM整流器控制策略,即电流内环采用内模控制,电压外环采用滑模控制,使系统同时具有滑模控制和内模控制的优点。
2 三相电压型PWM整流的数学模型
基于LCL滤波的三相PWM整流器的拓扑结构如图1所示。
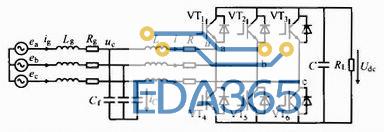
低频时,忽略滤波电容的作用,将网侧电感和交流侧电感用一个等效电感来代替。三相电压型PWM整流器在两相静止坐标系下的数学模型为:
对式(1)进行两相静止到两相旋转坐标变换,可得d,q坐标系下的数学模型为:
3 控制系统设计
3.1 电流内环的设计
由式(1)的数学模型变形得到:
基于内模控制PWM整流器的电流环控制结构框图如图2所示,如果内模控制器增加一个比例增益,系统的动态性能会变得更好。
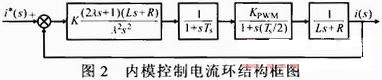
当λ=0.008时,画出电流内环的根轨迹,按二阶最优原理,使系统的阻尼系数为0.707,可知比例增益K=8.34,再画出系统的波特图,由图可知系统的相角裕度γ=63.6°,截止频率fc=242 Hz,满足fn≤fc≤10fn,控制器符合设计要求,系统稳定。
3.2 电压外环的设计
为了提高电压型PWM整流器直流侧电压的动态响应和鲁棒性,采用滑模变结构控制设计电压环。三相电压型PWM整流器在d,q坐标系下
的数学模型为式(2),将其改写为状态方程:
由式(7)可知,PWM整流器有sd,sq两个控制量,其中sd用来控制PWM整流器直流侧电压udc,sq用来控制无功电流iq以获得期望的功率因数。对于式(7)期望输入正弦电流,且功率因数为1,输出电压为设定值,故可选取udc和iq为系统输出,则式(7)改写为:
根据式(12)来设计滑模控制器。
4 仿真和实验结果
4.1 仿真验证
在Matlab/Simulink中建立仿真模型,控制结构如图3所示,采用传统的双闭环结构,电压外环采用滑模控制,电流内环采用内模控制,仿真参数:电源电压有效值为60 V,直流侧电压为150 V,开关频率为5 kHz,直流侧滤波电容值为3 000μF,负载为30 Ω,系统的阻尼电阻为8Ω。

由整流器电网侧电压和电流仿真波形及电流频谱分析可知,电压电流工作在单位功率因数,且网侧电流畸变很小。由整流器直流侧电压仿真波形可知,外环采用滑模控制,内环采用内模控制的控制方法比双环都采用内模控制时的调节时间更短,动态响应快。

图4a为突加负载时直流侧电压波形,图4b为突加电压给定时直流侧电压波形,由图可知,外环采用滑模控制,内环采用内模控制的鲁棒性最强,PI控制次之,内模控制的鲁棒性最差。图4c为突加滤波电感时直流侧电压波形,由图可知,外环采用滑模控制,内环采用内模控制对被控对象的数学模型精度要求最低,内模控制次之,PI控制对被控对象的数学模型精度要求最高,由此说明外环采用滑模控制,内环采用内模控制的控制方法可将两种控制方法的优点结合在一起,有更好的控制效果。
4.2 实验结果
为了进一步验证以上控制方法的正确性,搭建了以TMS320F2812为控制核心的三相电压源型PWM整流器的实验平台。系统参数与仿真一致,所得到的波形如图5所示。图5a为稳态时整流器网侧a相电压和电流实验波形,由图可见,整流器的网侧电压与电流几乎是同相位的,且正弦度很好,功率因数接近于1。图5b为突加负载时整流器直流侧电压波形,由图可见,系统的鲁棒性很强,达到了控制目的。

通过仿真和实验,证明了外环采用滑模控制,内环采用内模控制的双闭环控制系统可以充分结合两者的优点,具有优异的动静态性能。
5 结论
这里提出了一种PWM整流器控制策略,即电压外环采用滑膜控制,电流内环采用内模控制,使系统不仅具有滑模控制对负载扰动和系统参数漂移的良好适应性以及良好的快速性,而且具有内模控制对被控对象参数依耐性小、能获得良好跟踪性能和较高稳态精度的优点,因此系统具有优异的动静态性能。仿真分析和实验表明了所提出方法的有效性和优越性。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 高效率.降压型稳压器:LTM4626和LTM4638
高效率.降压型稳压器:LTM4626和LTM4638






 APP下载
APP下载 登录
登录