1 引言
在实时控制领域,16位单片机由于其运算速度和精度已得到广泛的应用,尤其在工业过程控制及仪表中,16位单片机对于步进电机的精确控制具有特别重要的意义。在对某型船用燃油机的油门控制器的研制过程中,步进电机作为执行元件,如何提高步进电机的运动平稳性、抗干扰性、可靠性成为研究的核心问题。
对于基于16位单片机的步进电机控制系统来说,驱动电源的输出直接作用于步进电机的绕组,因而驱动电源性能好坏直接影响步进电机的运行性能。
2 对步进电机驱动电源的核心要求
由于步进电机的驱动电流比较大,所以单片机与步进电机的连接需要专门的功率放大电路和驱动电路。油门控制要求响应速度快,运动曲线复杂,所以要求步进电机提高运行特性和反应速度.因此控制系统对于功率放大驱动电路的核心要求是:
(1) 按总体要求提供步进电机的驱动电流;
(2) 实现对信号电流的快速响应;
(3) 保证步进电机的运行平稳性;
(4) 保证步进电机的运行精度,即做到步进电机不失一步;
本次设计采用步进电机的型号为75BF001,工作在三相六拍方式,额定电压24伏静态电流3A,步距角1.5°,保持转矩0.392 N·M,空载启动频率1500 PPS。
3 对步进电机功率放大电路的分析
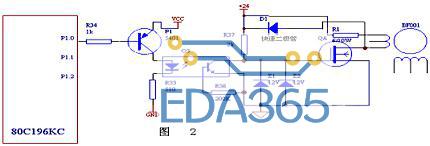
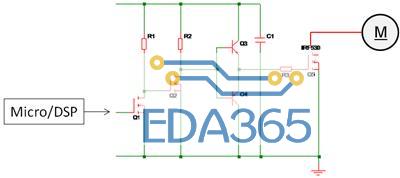
本次设计采取80C196KC P1.0、P1.1、P1.2分别发出A相、B相、C相。步进脉冲经过光耦隔离后,再加至功率放大驱动电路。其初步电路方案如图2。当某一路,如P1.0为“1”时,光耦不工作,CMOS 管IRFP250导通。A相线圈通电,P1.0为“0”时,光耦工作,CMOS管IRFP250 B极拉至低电平而截止,线圈断电。由此可见,改变P1.0~P1.2引脚的电平,可实现 A相~C相的通断电控制。
其中,快速二极管D1的作用是为绕组建立续流回路,当步进电机某一相断电时,不会因为感性元件而产生冲击电流和反向高压,对CMOS管IRFP250起到保护作用。
CMOS管的理想工作状态是输出矩形波电压,但由于绕组线圈中的电流不能突变,接通电源后绕组中的电流按指数规律上升,时间常数t=L/r(L为绕组电感 ,r为绕组电阻),须经过3t时间才能达到稳态电流,由于绕组电阻很小,而绕组电感却很大,因而时间常数很大,从而严重影响了电机的启动频率和平稳运行。
为了克服这个缺点,在绕组中串联电阻R1。这样,t=L/(R1+r)时间常数大大减小,从而提高了电机的工作速度,改善了输出波形。不过尽管如此,一般的单电压驱动电路还是存在对脉冲电压响应速度慢,输出波形差和输出功率低等缺点。为了克服这些缺点,我们经过反复试验,研制出下面这种改进的单电压功率驱动电路。
[page]4 新型功率驱动电路设计
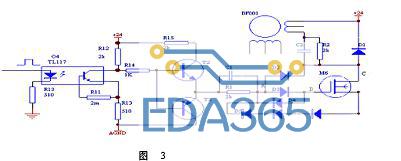
图3是该驱动电路其中一相的电路示意图。如图所示,O4为光耦。当输入端为高电平时,T2三极管(NPN)导通,T3三极管(PNP)截止,M6功放管工作在截止状态。图中电阻R2、二极管D1和电容C3的作用于前面初步方案一样,在此不再赘述。在R2两端并联电容C2作用是在M6管由截止到导通的瞬间,使电源电压全部落在绕组上,使电流上升更快,从而提高电机对脉冲电流的响应速度,因此C2又称作加速电容。二极管D2作用是临界饱和负反馈,它与D3管相互配合,使M6管在导通时始终工作在饱和状态,另外它还有使M6加速向饱和状态转换的的作用。电容C1和二极管D4、D5起快速关断作用,即当M6管导通时,C1两端的电压通过T3和D5回路释放出来,从而在E、A两端产生一个电势差,由于D5比D4多了两个二极管,因此就在M6的BE结形成一个1.4V的反电势,从而大大缩短了M6由饱和向截止状态切换的时间。
经过对初步电路方案的改进后,大大提高了单电压驱动电路对脉冲电流的快速响应性,并很好地改善了绕组中的电流波形。图4示出了初步方案和改进后方案单电压驱动电路绕组中的电流波形比较(其中(a)为初步方案电路的电流波形(b)为改进后电路的电流波形)。从图中可清晰的看到改进后电路的电流波形近视为矩形波,功放管M6工作在接近理想状态,这大大提高了步进电机的运行精度。而D2、D5两个反馈电路以及D1、D3的引入又提高了整个电路的抗干扰能力。
5 总结
80C196KC对于步进电机的控制,在电路设计上要考虑功能扩充和可靠性等问题,特别在功率驱动电路的设计时应充分考虑步进电机的运行环境。改进后的单电源功率驱动回路,通过实际运行试验,步进电机的控制品质优良,达到了油门控制系统的总体要求。本文所述的单电源功率驱动电路在工业控制的其他领域具有一定的推广价值。
参考文献:
1.孙韩芳主编,INTEL 16位单片机,北京航空航天大学出版社,1999年11月
2.张建明编著,机电一体化系统设计 北京理工大学出版社 1996 年
3.李清泉编著,自适应控制系统理论设计及应用,科学出版社,1990年3月
4.童诗白编著 模拟电子技术基础 ,高等教育出版社 1988
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』











 热门文章
更多
热门文章
更多

 LED驱动电路工程中的计算方法详述
LED驱动电路工程中的计算方法详述





 APP下载
APP下载 登录
登录







