2025 CPCA Show Plus 圆满落幕!筑就电子半导体生态新高地
工业机器人常用电机驱动系统的分类 机器人电动伺服驱动系统是利用各种电动机产生的力矩和力.直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构.对工业机器人关节驱动的电动机.要求有最大功率质量比和扭矩惯量比.高起动转矩.低惯量和较
细数AGV的几种导航方式 随着工厂自动化.计算机集成的制造系统技术逐步发展和自动化立体仓库的广泛使用.AGV作为联系物流管理系统有必要的自动化搬运小车.其自身的范围和技术水平都得到了迅猛的发展.但是往往越来越多的人知道它.觉得需
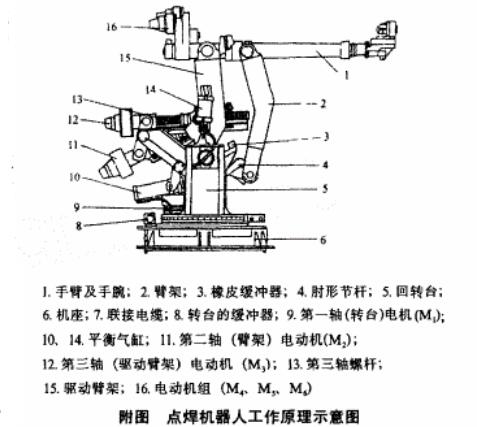
点焊机器人工作原理_点焊机器人的应用 点焊机器人工作原理 点焊机器人被广泛用来焊接薄板材料.点焊作业占汽车工厂的车体组装工程的大半.点焊机器人手臂上所握焊枪包括电极.电缆.气管.冷却水管及焊接变压器.焊枪相对比较重.要求手臂的负重能力较
关于工业机器人的一些基本概念 工业机器人看起来高大尚.很多初学者学习的时候无从入手.实际上只要掌握了以下这些概念和基础.你完全就理解它的机理和落地场景了.1.1工业机器人常用术语1.自由度(Degree of Freedom,DOF) 物体相对坐标系能够进行
PCB行业新技能:自动化设备+工业机器人 自从有了机器人之后.工业是迈进了一个新的发展模式.机器人的助力在很大程度上减少了人员的负担.还使工业发展得到了更高效的生产.如今.工业机器人+ 自动化设备的生产模式将成为PCB行业转型发展的新趋势. PCB
小米扫地机器人功能及参数详细 米家扫地机器人 2016年8月31日.在小米生态链2016秋季沟通会上.小米正式发布旗下品牌米家的最新智能化产品--米家扫地机器人.售价1699元.将于2016年9月6日在小米网和小米之家首发销售. 家App远程操控.即使
史陶比尔全封闭式6轴机器人 在汽车零部件中去毛刺的应用 Maschinenbau Silberhorn公司制造 的REZ自动化去毛刺工作单元使用了 压力高达2000 bar的水射流来同步完 成对汽车零部件的去毛刺和清洁作 业.专用于湿室应用和潮湿喷淋区域的史陶比尔潮湿环境(HE)机器人是整 套设备


 APP下载
APP下载 登录
登录