APP下载
APP下载 登录
登录








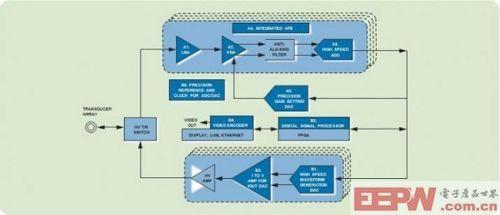
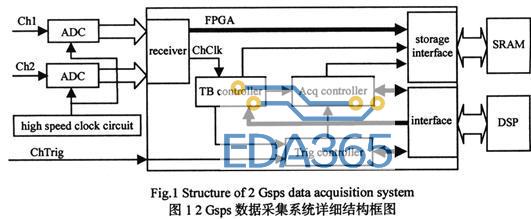
本系统的硬件由ADSP-BF561 处理器、FLASH、红外视频采集模块、显示与控制模块等组成,如图1所示。FLASH用于上电初始时为DSP加载程序,可保证在掉电后,DSP程序不丢失。FLASH选用ADI公司的AM29LV800DB,数据宽度配置成16bit。容量为1Mbit。
1. 红外视频采集模块
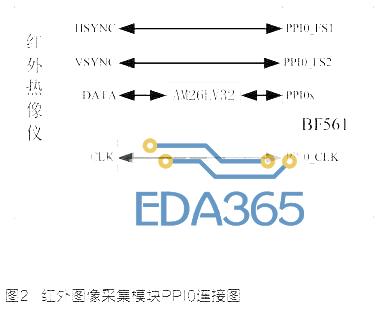
红外视频采集模块主要由IR130型制冷式凝视型红外热像仪、AM26LV32芯片和外扩SDRAM组成。红外热像仪具有宽窄两种视场,成像尺寸为320×256像素2。输出的数字视频信号由数据时钟、行同步信号、场同步信号和图像数据构成,我们采用通用输入模式,即非ITU-656输入模式。时钟信号连接到BF561的PPI0_CLK引脚上,作为并行数据传输的时序基准,行同步和场同步信号分别接在BF561中的PPI_FS1和PPI_FS2引脚上,在BF561内部,这两个引脚连接到了定时器的PWM电路,通过设置TIMER1和TIMER1的相关寄存器来设定视频信号的同步时序参数。由于图像信号为RS422LV电平,而BF561处理器的可处理的电平信号是TTL电平,因此需要先对红外图像信号进行电平转换。PPI0连接图如图2所示。
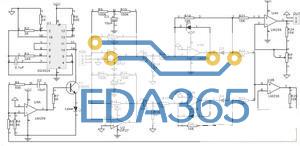
由于进行目标检测与跟踪需要多帧图像积累,需要的存储空间较大。本系统采用1片32MByte的SDRAM来存放红外图像数据,SDRAM与BF561之间电气连接图如图3所示:
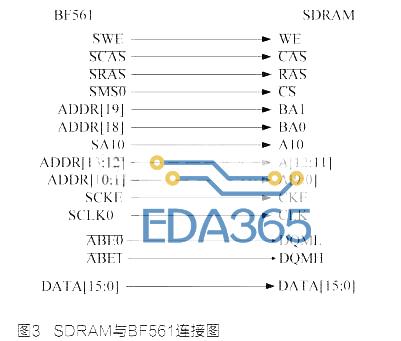
红外图像数据经过AM26LV32电平转换芯片转换为TTL电平后,由BF561处理器的PPI0接口通过DMA自动存放在SDRAM。
2. 显示与控制模块
监控模块主要由LCD液晶显示器、上位机、ADV7171芯片组成。显示器用来显示采集的灰度图像、检测并跟踪到的目标、目标方位角和高低角、伺服转台的方位角和高低角、系统状态。上位机可以通过网口进行目标选择、算法选择、各种参数配置等操作。BF561将处理后的红外图像进行编码,使图像符合ITU-656 PAL制式视频格式,然后通过ADV7171芯片编码转化成为PAL制式的模拟视频信号输出到LCD液晶显示器中。由于PAL制式中能显示的一帧有效图像数据是720×625像素,而红外图像格式是320×256像素,为了充分利用显示屏,本系统通过进行4次MDMA,把图像扩大为640×512像素。屏幕的剩余尺寸用来显示跟踪数据和各种状态信息。
BF561接收从网口传来的上位机的各种指令。网口采用了Standard Microsystems Corporation SMSC)公司的以太网控制器LAN91C111芯片。该芯片提供了面向嵌入式应用的网口解决方案,内部有一个内存管理单元,可以有效地动态分配内存,减轻处理器的工作,支持同步和异步传输。








 热门文章
热门文章