APP下载
APP下载 登录
登录







把更新率作为“广告说明”的一个案例
目前,广告说明词(示波器供应商通常用在他们广告的顶部)包括带宽、采样率、存储深度和价格。然而,更新率同等重要,这是因为它以示波器捕获间歇和重复事件的能力为特征。示波器采集多少数据—或者采集数据的速度有多快—无关紧要,如果它花更多的时间在显示数据上,而不是获得采集上的话;而且,如果示波器的触发电路要经过缓慢的准备才能进行下一次采集的话,该显示系统的速度也不要紧。
更新率是重要的,因为它能影响调试方法。以上面提到的短脉冲干扰为例,如果工程师知道存在这些短脉冲干扰,就很容易利用脉宽触发把它隔离开。然而,这指的是被认为不会造成大问题的短脉冲干扰。当用户拿到一块新的电路板时,大部分用户会逐个引脚地“粗略检查”一遍。具有快速更新率的示波器增加了在临时检查期间找到小问题的机率,从而增加用户对电路板的信心。如果你对示波器的显示性能没有信心,用户将必须采用触发系统来搜寻在各个引脚上的每一个潜在的问题。
快速更新率的另一个有用的应用是生产测试。许多测试需要在同一个测试点上进行多次采集以提高测量的可信度。采样点数越多,极限特性就越好。掩模测试就是一个很好的例子。较慢的更新率会迫使在更低的测试吞吐量和更低的测量可信度之间进行折衷。
尽管通常的LCD或CRT恰好以60Hz进行刷新,人们仍能从数量级为每秒钟成百上千个波形的更新率中获益。所有的数据能够被显示出来,但是,采用“视觉后滞”算法可以把各个采集点覆盖起来,因为这种算法采用颜色或密度等级以显示所出现的频率。它就像从上面看这个线迹的柱状图。
特征化更新率
更新率是一个动态的特性。它与重复采集有关,而与“单次采集”测量无关。并且,它会随着示波器的时基设置、操作模式及其架构而有所变化。
更新率会受到两次采集之间的“死区时间”的限制。在“死区时间”(图1)期间出现的任何事件,示波器都是观测不到的。死区时间的来源有几个。最重要的是它从采集存储器获取数据进行显示所花的时间。

图1.“在两次采集之间的死区时间期间”出现的事件可能会观测不到。
在基本水平线上,一些示波器在采集和显示之间完全具有比另外一些示波器更快的数据连接。架构也是要紧的。一些设计在重新填满它之前,要把所有送到显示器的数据清空;另一个方法是把来自不同采集存储器的数据“打”到显示器上;第三种办法是让数据排队等待进入显示器。其它的因素包括所处理的存储器的大小和在触发系统中固有的延迟。
很多示波器具备能加速更新率的特殊模式。它们通过减少存储深度或旁路大多数触发电路来实现这一点。作为一个规则,这些特殊的模式需要对性能进行折衷(如采样率的减少或不能执行甚至是简单的触发),并且要小心使用。
如果示波器具有一个外部触发并且提供一种频率计数器测量功能,如Agilent DSO5054A,就可以执行的一个简单实验。采用50Ω BNC电缆能把外部触发连接到示波器的通道 1。把示波器设置为自动触发,频率计数器测量将会计算每秒的触发数,这与最大的更新率十分接近。如果示波器不提供外部触发,用户就可以替换一个高频源作为输入。
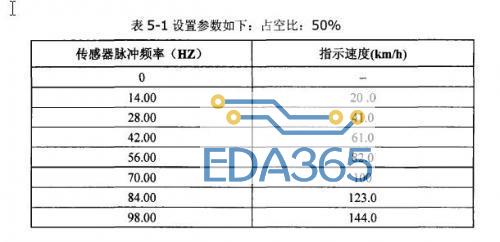
占空周期
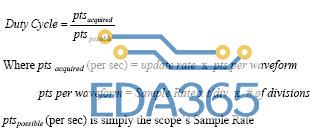
如果把更新率和死区时间的概念放在占空周期的环境中,就更容易把这两个概念形象化。对于一台示波器而言,占空周期是示波器正在采集数据的时间百分比。在采集数据上花的时间越多,发现间歇事件的机率越多。
如果示波器的更新率是已知的,就很容易计算这一更新率。让我们从更传统的占空周期的定义开始:

由于示波器是一种显示已知时间周期的时域仪器,我们能简化该计算。
例如,示波器被设定为2μs/格,并且具有4 GSample/s的采样率。所测得的更新率是每秒19,300个波形。
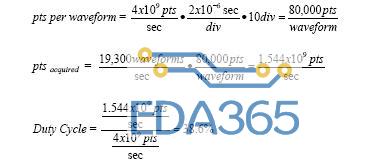
因此,在这个设置下,示波器采集数据占38.6%的时间。
针对你的调试方法的提示
图2所示为占空周期随着不同示波器的不同t/div设置而变化的情况。你要注意到两种趋势:
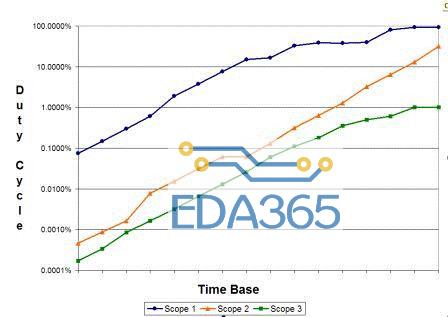
图2:现实世界中示波器模式的负载循环曲线。
1.在不同示波器之间,占空周期会有多达2.5个数量级的变化。如果你有一个10MHz微处理器,在对存储器进行写入操作的过程中,每100万个周期会出现一次失败,30%占空周期的示波器将会以每秒三次来显示该错误;0.3%占空周期的示波器每33秒会显示它一次。提示:如果这一示波器有较慢的更新率,用户应当依赖于触发来找到这些间歇问题。临时的观察是不充分的。
2. 占空周期会随着时基(扫描)的放慢而增加。在每次采集中,数据数量的增加要比更新率减少的速度要更快。随着示波器进入“滚动(显示)模式”, 占空周期就会变为100%有效。提示: 降低扫描速度可以提高你利用所有型号示波器观察间歇性异常的能力。
这些技术假设存在罕有的或不经常发生的事件。如果要寻找“一次”性事件,硬件触发仍然是最佳的选择。然而,对于基本的系统特性描述和调试来说,快速的更新率允许更为深入地探究系统内部的行为。

图3
虽然本文重点讨论的是更新率,但是,正是更新率、采样率和存储深度之间的相互影响,确定了示波器的有效性和用户对其测量结果的信任程度(如图3所示)。在选择示波器时,用户要记住这三项技术指标,以及如何使之适应待完成的测量任务。
关于作者
Phil Stearns是安捷伦公司电子测量组数字验证分部负责评估示波器的产品经理。
Phil拥有辛辛那提大学电子工程学士学位和凯斯西储大学的MBA学位。Phil于1996年入职于惠普/安捷伦,并在推广示波器和逻辑分析仪方面担任过各种职位。Phil也曾在安捷伦的研发、营销和顾问等职位工作过。
Phil目前是位于科罗拉多斯普林斯设计验证分部负责评估示波器产品线的产品经理。
这篇文章的积极意义在于明确给出了波形更新率(也叫刷新率)跟波形捕获概率(工作效率)之间的关系,并给出了计算公式。这样以来,我们就可以轻易的知道手头示波器的工作效率(占空比)。拿54622D为例。
将时基设置为1ms/div,实时采样率200MSa/s,trig out的频率变为75Hz,也就是说波形更新率每秒75个波形。

54622D 1mS/div时基
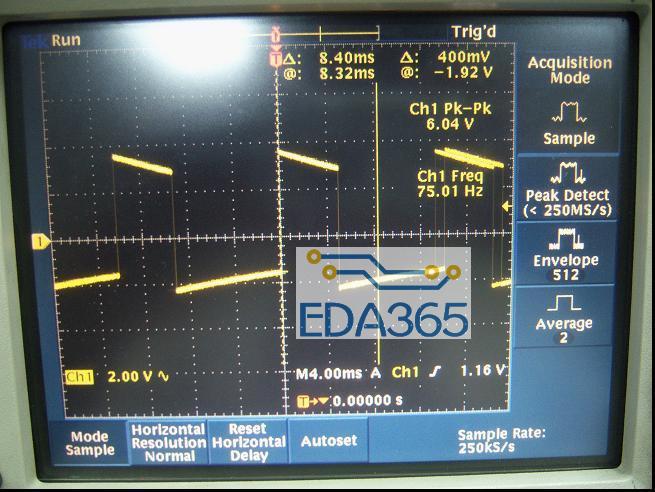
54622D trig out波形

大家可能已经注意到pts per waveform为2M,其实这就是内存深度,54622D的模拟通道存储深度为2Mpts。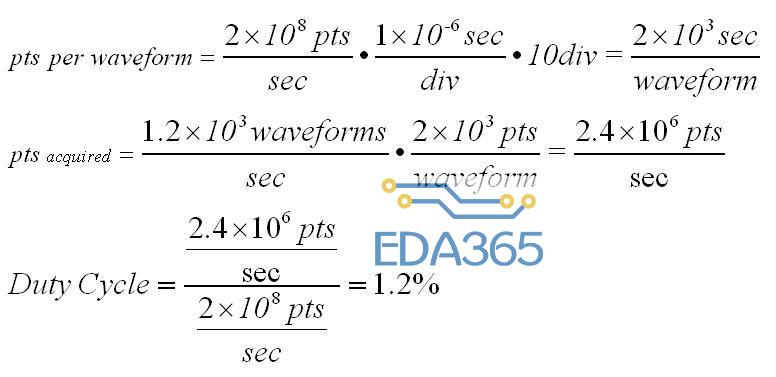

附:获得54620D最大存储深度时的对应设置
时基设置为1us/div,实时采样率200MSa/s,trig out的频率是1.2kHz,也就是说波形更新率每秒1200个波形。
54622D 1uS/div 时基
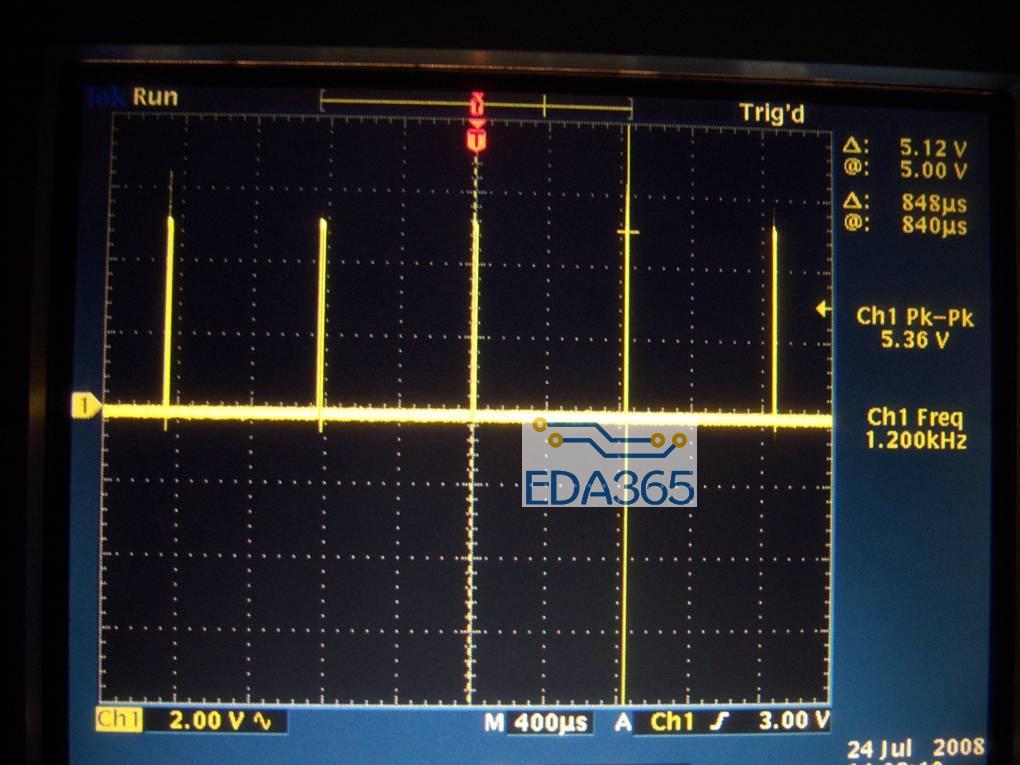
54622D trig out波形
54622D 1uS/div 时基
54622D trig out波形
大家注意到这里的pts per waveform只有2k,这说明54622D在1uS/div的时基下由于只有最大200Msps的采样率,所以只能达到2k深度的内存,而达不到标称的2M。后续型号54640系列将最大采样率做到2Gsps,4M的存储深度,这样就可以在2us/div的时基下,达到2Gsps的采样率,但当时基小于2us/div时,仍然要受限于采样率而牺牲存储深度。
从以上可以看出54622D的波形更新率最高1.2k次每秒,最低只有几十次每秒。工作效率最高可达75%,此时死区所占比例最小,存储器的利用率最高。
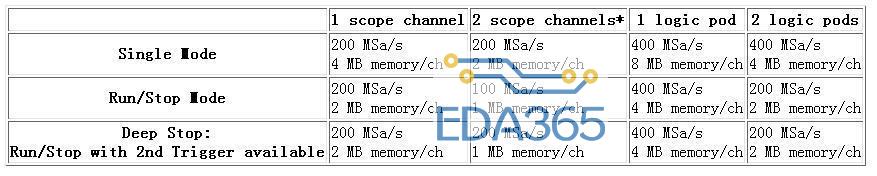
下图是在相同时基下,不同内存深度的示波器所具有的最大采样率。10k内存深度可看成是Tek的TDS3000系列。以TDS3014为例,在1uS/div时基下,达到1Gsps的采样率,当时基小于1uS/div时,采样率仍为1Gsps。反过来说,如果你手头的示波器最大采样率只有1Gsps的话,不管其标称的存储深度有多深,在10nS/div的时基下,全屏只有100个样点。
附:获得54620D最大存储深度时的对应设置








 热门文章
热门文章