
汽车网络通信中除了CAN的通信方式外,还有另外一种低成本通信方式——LIN系统。它的英文是“Local Interconnect Network”,LIN总线基于UART/SCI(通用异步收发器/串行接口)的串行通信协议,主要用于智能传感器和执行器的串行通信,车上各个LIN总线系统之间的数据交换是由控制单元通过CAN数据总线实现的。
LIN特点是用作主从控制系统,一个主控系统可以带最多16个子系统,并且子系统只具备与主系统通信的功能,各个子系统之间无法通信,也不能与LIN网络之外的系统模块进行通信。
LIN一般应用于车门控制系统,比如福特蒙迪欧致胜和克鲁兹的车门电动玻璃控制系统就采用LIN控制。
我们这里以测量奥迪汽车LIN总线控制的雨刷电机为例。

连接一条BNC转香蕉头线到示波器的通道一上。连接一根刺针到红色香蕉头,刺入到车辆上的插头里面的LIN总线数据信号端子上。香蕉头的黑色接头接一个鳄鱼夹到蓄电池负极或良好的底盘接地上。

由于LIN总线一般最大值在12V左右,因此可以设置示波器的垂直档位为2V/div,时基可以设置为500μs左右。然后打开示波器的解码菜单,进行LIN总线配置,选择与被测信号相匹配的波特率。调节总线阈值电平到波形显示范围内,就可以看到解码数据了。可以将触发方式改为总线解码触发,设置合适的帧ID来稳定波形。
如下图就是奥迪汽车雨刷电机LIN总线控制信号。
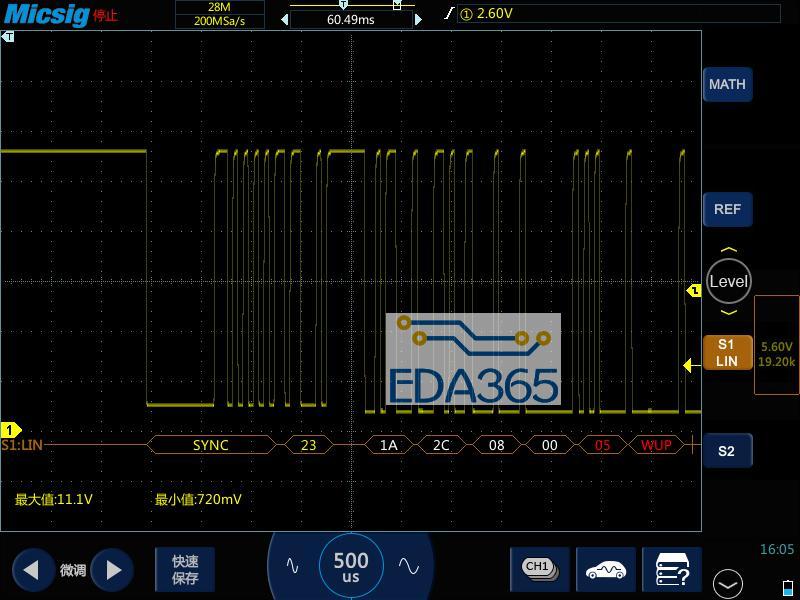
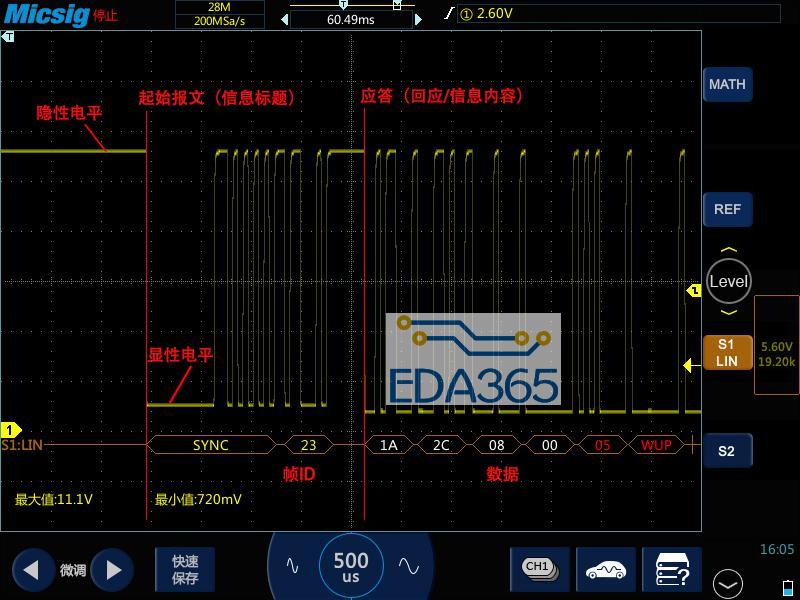
LIN总线波形是一个方波,代表着串行数据流里的二进制状态。所见的波形应该没有明显的变形和噪音毛刺。解码数据包以十六进制显示总线活动时的实时数据内容。“帧ID”显示颜色为黄色,上图中即是23,“数据”显示颜色为白色,“校验和”显示颜色为绿色,如果校验和错误,以红色“E”显示。
如果无信息发送到LIN数据总线上(总线空闲)或者发送到LIN数据总线上的是一个隐性位,LIN总线信号上的最大值即隐性电平。
当传输显性位时,发送控制单元内的收发器将LIN数据总线接地。表现为LIN总线信号上的最小值,即显性电平。
LIN总线的信息格式由起始报文(信息标题)和应答(回应/信息内容)两部分组成。
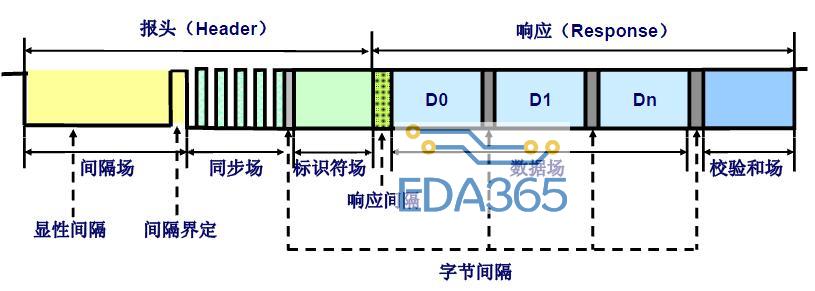
起始报文(信息标题)由LIN主控制单元按周期发送,由同步暂停区、同步分界区、同步区、识别区构成;应答(回应/信息内容),由LIN主控制单元或从控制单元发送。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 labview深入探索----谈谈LABVIEW的几种定时器
labview深入探索----谈谈LABVIEW的几种定时器





 APP下载
APP下载 登录
登录







