
机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。
机器人本体属于设备集成的范畴。按照机械结构分,机器人本体可分为直角坐标机器人、SCARA机器人、关节型机器人、并联机器人及其他。不同种类或行业的机器人,对技术指标有不同的侧重要求。如汽车行业的焊接机器人对关节型机器人本体有较高精度和速度和要求,而码垛类机器人、搬运机器人则对负载能力要求比较高,应用于电子行业较多的SCARA 机器人则对精度和速度要求比较高。全球工业机器人市场主要为关节型全球工业机器人。
(1)开式运动链:结构刚度不高 。
(2) 相对机架:独立驱动器,运动灵活。
(3) 扭矩变化非常复杂:对刚度、间隙和运动精度都有较高的要求。
(4) 动力学参数(力、刚度、动态性能)都是随位姿的变化而变化:易发生振动或出现其他不稳定现象。
1)自重小:改善机器人操作的动态性能;
2)静动态刚度高:提高定位精度和跟踪精度;增加机械系统设计的灵活性;减小定位时的超调量稳定时间,降低对控制系统的要求和系统造价;
3)固有频率高:避开机器人的工作频率,有利于系统的稳定。
机器人目前是典型的机电一体化产品,一般由机械本体、控制系统、传感器、驱动器和输入/输出系统接口等五部分组成。其中机器人本体部分组成就是机械部分、传感部分和控制部分组成,这里小编为大家分享一下。
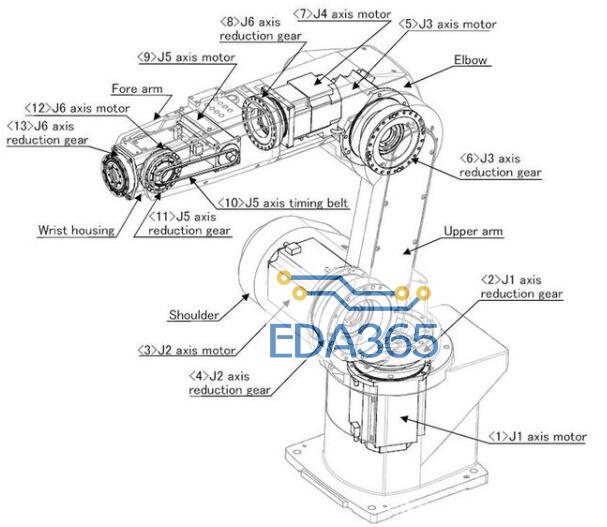
1、机器人本体机械部分
机器人的机械结构系统由机身、手臂、末端操作器三大件组成。每一大件都有若干自由度,构成一个多自由度的机械系统。机器人按机械结构划分可分为直角坐标型机器人、圆柱坐标型机器人、极坐标型机器人、关节型机器人、SCARA型机器人以及移动型机器人。
2、机器人本体传感部分
它由内部传感器模块和外部传感器模块组成,获取内部和外部环境中有用的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化水平。人类的感受系统对感知外部世界信息是极其巧妙的,然而对于一些特殊的信息,传感器比人类的感受系统更有效。
3、机器人本体控制与驱动部分
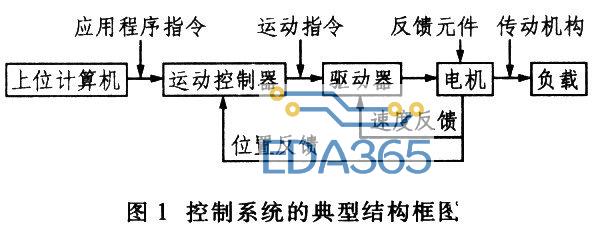
控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。 根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。
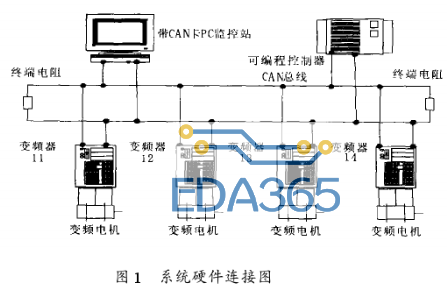
驱动系统是向机械结构系统提供动力的装置。采用的动力源不同,驱动系统的传动方式也不同。驱动系统的传动方式主要有四种:液压式、气压式、电气式和机械式。电力驱动是目前使用最多的一种驱动方式,其特点是电源取用方便,响应快,驱动力大,信号检测、传递、处理方便,并可以采用多种灵活的控制方式,驱动电机一般采用步进电机或伺服电机。
其实这种机器人之所以能够实现这么流畅的动作,不仅仅是微型计算机的控制技术,也是与伺服电动机的飞速发展息息相关的。
机器人的伺服电机系统,设备在感知外界信息后会快速传递给控制器,然后控制器会发出控制信号驱动伺服电机系统快速进行姿势调整。伺服电机系统在这里就是利用各种电机产生的力矩和力,直接或间接地驱动机器人本体来获得机器人的各种运动。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 新网站为数字化制造投资决策提供实用指南
新网站为数字化制造投资决策提供实用指南






 APP下载
APP下载 登录
登录







