
有刷电机工作原理
有刷电机是大家早接触的一类电机,中学时物理课堂上介绍电动机也是以它为模型来展示的。有刷电机的主要结构就是定子+转子+电刷,通过旋转磁场获得转动力矩,从而输出动能。电刷与换向器不断接触摩擦,在转动中起到导电和换相作用。
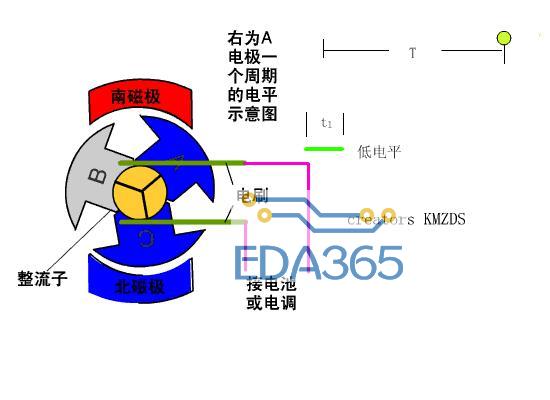

有刷电机采用机械换向,磁极不动,线圈旋转。电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。

在有刷电机中,这个过程是将各组线圈的两个电源输入端,依次排成一个环,相互之间用绝缘材料分隔,组成一个象圆柱体的东西,与电机轴连成一体,电源通过两个碳元素做成的小柱子(碳刷),在弹簧压力的作用下,从两个特定的固定位置,压在上面线圈电源输入环状圆柱上的两点,给一组线圈通电。
随着电机转动,不同时刻给不同线圈或同一个线圈的不同的两极通电,使得线圈产生磁场的N-S极与靠近的永磁铁定子的N-S极有一个适合的角度差,磁场异性相吸、同性相斥,产生力量,推动电机转动。碳电极在线圈接线头上滑动,象刷子在物体表面刷,因此叫碳“刷”。
相互滑动,会摩擦碳刷,造成损耗,需要定期更换碳刷;碳刷与线圈接线头之间通断交替,会发生电火花,产生电磁破,干扰电子设备。
无刷电机工作原理
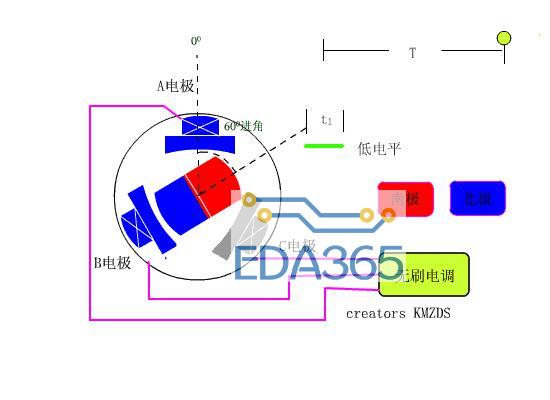
无刷电机中,换相的工作交由控制器中的控制电路(一般为霍尔传感器+控制器,更先进的技术是磁编码器)来完成。
无刷电机采取电子换向,线圈不动,磁极旋转。无刷电机,是使用一套电子设备,通过霍尔元件,感知永磁体磁极的位置,根据这种感知,使用电子线路,适时切换线圈中电流的方向,保证产生正确方向的磁力,来驱动电机。消除了有刷电机的缺点。
这些电路,就是电机控制器。无刷电机的控制器,还可以实现一些有刷电机不能实现的功能,比如调整电源切换角,制动电机,使电机反转,锁住电机,利用刹车信号,停止给电机供电。现在电瓶车的电子报警锁,就充分利用了这些功能。
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。由于无刷直流电动机是以自控式运行的,所以不会象变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。
有刷电机与无刷电机调速方式的区别
实际上两种电机的控制都是调压,只是由于无刷直流采用了电子换向,所以要有数字控制才可以实现了,而有刷直流是通过碳刷换向的,利用可控硅等传统模拟电路都可以控制,比较简单。
1、有刷马达调速过程是调整马达供电电源电压的高低。调整后的电压电流通过整流子及电刷地转换,改变电极产生的磁场强弱,达到改变转速的目的。这一过程被称之为变压调速。
2、无刷马达调速过程是马达的供电电源的电压不变,改变电调的控制信号,通过微处理器再改变大功率MOS管的开关速率,来实现转速的改变。这一过程被称之为变频调速。
性能差异
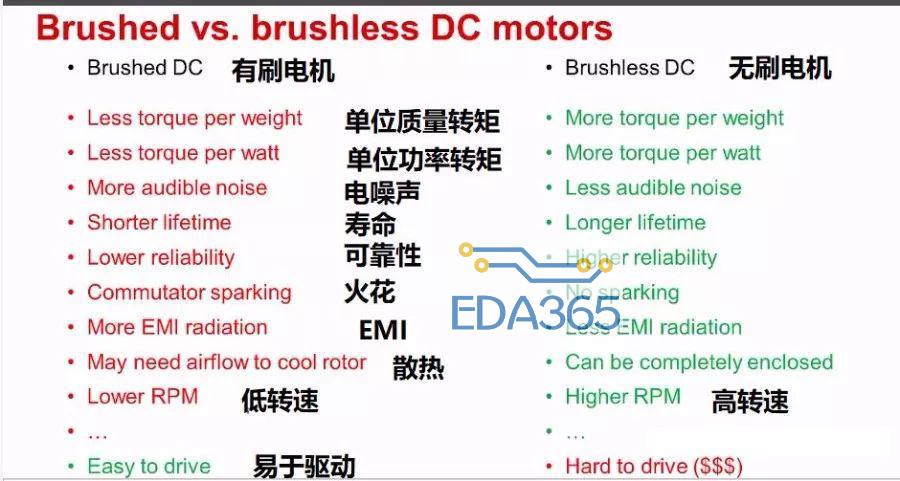
TI的一个介绍视频关于有刷电机与无刷电机的对比,如下图所示,很完整。
1、有刷电机结构简单、开发时间久、技术成熟早在十九纪诞生电机的时候,产生的实用性电机就是无刷形式,即交流鼠笼式异步电动机,这种电动机在交流电产生以后得到了广泛的应用。但是,异步电动机有许多无法克服的缺陷,以致电机技术发展缓慢。尤其是直流无刷电机一直无法投入商业运营,伴随着电子技术的日新月异,直至近几年才慢慢投入商业运营,就其实质来说依然属于交流电机范畴。
无刷电机诞生不久,人们就发明了直流有刷电机。由于直流有刷电机机构简单,生产加工容易,维修方便,容易控制;直流电机还具有响应快速、较大的起动转矩、从零转速至额定转速具备可提供额定转矩的性能,所以一经问世就得到了广泛应用。
2、直流有刷电机响应速度快,起动扭矩大
直流有刷电机起动响应速度快,起动扭矩大,变速平稳,速度从零到几乎感觉不到振动,起动时可带动更大的负荷。无刷电机起动电阻大(感抗),所以功率因素小,起动扭矩相对较小,起动时有嗡嗡声,并伴随着强烈震动,起动时带动负荷较小。
3、直流有刷电机运行平稳,起、制动效果好
有刷电机是通过调压调速,所以起动和制动平稳,恒速运行时也平稳。无刷电机通常是数字变频控制,先将交流变成直流,直流再变成交流,通过频率变化控制转速,所以无刷电机在起动和制动时运行不平稳,振动大,只有在速度恒定时才会平稳。
4、直流有刷电机控制精度高
直流有刷电机通常和减速箱、译码器一起使用,使的电机的输出功率更大,控制精度更高,控制精度可以达到0.01毫米,几乎可以让运动部件停在任何想要的地方。所有精密机床都是采用直流电机控制精度。无刷电机由于在启动和制动时不平稳,所以运动部件每次都会停到不同的位置上,必须通过定位销或限位器才可以停在想要的位置上。
5、直流有刷电机使用成本低,维修方便
由于直流有刷电机结构简单,生产成本低,生产厂家多,技术比较成熟,所以应用也比较广泛,比如工厂、加工机床、精密仪器等,如果电机故障,只需更换碳刷即可,每个碳刷只需要几元,非常便宜。无刷电机技术不成熟,价格较高,应用范围有限,主要应在恒速设备上,比如变频空调、冰箱等,无刷电机损坏只能更换。
6、无电刷、低干扰
无刷电机去除了电刷,直接的变化就是没有了有刷电机运转时产生的电火花,这样就极大减少了电火花对遥控无线电设备的干扰。
7、噪音低,运转顺畅
无刷电机没有了电刷,运转时摩擦力大大减小,运行顺畅,噪音会低许多,这个优点对于模型运行稳定性是一个巨大的支持。
8、寿命长,低维护成本
少了电刷,无刷电机的磨损主要是在轴承上了,从机械角度看,无刷电机几乎是一种免维护的电动机了,必要的时候,只需做一些除尘维护即可。
无刷电机控制原理
电机驱动控制就是控制电机的转动或者停止,以及转动的速度。电机驱动控制部分也叫做电子调速器,简称电调,英文electronic speed controller(ESC)。电调对应使用的电机不同,分无刷电调和有刷电调。
有刷电机的永磁体是固定不动的,线圈绕在转子上,通过一个电刷跟换相器接触间断来改变磁场方向来保持转子持续转动。无刷电机,顾名思义,这种电机是没有所谓的电刷和换相器的,他的转子是永磁体,而线圈是固定不动的,直接接到外部电源,问题就来了,线圈磁场方向怎么改变呢?事实上,无刷电机外部还需要一个电子调速器,这个调速器说白了就是一个电机驱动,它随时都在改变着固定线圈内部电流的方向,保证它跟永磁体之间的作用力是相互排斥,持续转动得以延续。
无刷电机工作可以不需要电调,直接把电供给电机就能够工作,但是这样无法控制电机的转速。无刷电机工作必须要有电调,否则是不能转动的。必须通过无刷电调将直流电转化为三相交流电,输给无刷电机才能转动。
早的电调可不是像现在的电调一样,早全是有刷电调,说道这你可能要问了,什么是有刷电调,和现在的无刷电调有什么区别。事实上这差别呀可大了去了,有刷电调和无刷电调都是根据电机来说的,现在电机的转子,就是能转动的部分全是磁铁块,线圈是定子不转动的,因为这中间没有碳刷,这就是无刷电机。而有刷电机呢,顾名思义就是有碳刷,所以就是有刷电机,像我们平常小孩子玩的一二十块钱的遥控车用的电机就是有刷电机。电调就是根据这两种电机而命名的有刷电调和无刷电调。从的角度来讲呢就是有刷电调就是输出时直流电,无刷电调输出是三相交流电。直流电就是我们电池里存储的电,有正负极之分,我们家用220V的,用于手机充电器或者电脑的电源都是交流电。交流电就是带有一定的频率,通俗讲就是一根线上正负、正负的来回交换着;直流电就是正极是正极,负极是负极。交流直流弄清楚了,那么什么又是“三相电”呢?理论讲三相交流电是电的一种传输形式,简称三相电,是由3个频率相同、振幅相等、相位依次互差120度的交流电势组成的电源。通俗的讲,就是我们家用的三项交流电,除了电压、频率、驱动角不同,其他都一样,现在对于三相电和直流电都了解了吧。
无刷电调,输入的是直流电,通过一个滤波电容稳定电压。然后分成俩两路,一路是电调的BEC使用,BEC是给接收机与电调自身单片机供电使用的,输出至接收机的电源线就是信号线上的红线和黑线,另一路是介入MOS管使用,在这里,电调上电,单片机开始启动,驱动MOS管震动,使电机发出滴滴滴的声音。启动后待命,有些电调带有油门校准功能,在进入待命前会监测油门位置是在高还是低还是中间,高的话进入电调行程校准,中间的话开始发出报警信号,电机会滴滴的响,低的话会进入正常工作状态。一切准备就绪后,电调内的单片机会根据PWM信号线上的信号决定输出电压的大小和频率的高低以及驱动方向和进角多少来驱动电机的转速,转向。这就是无刷电调原理。在驱动电机运转的时候,电调内共有3组MOS管工作,每组2个极,一个控制正极输出,一个控制负极输出,当正极输出时,负极不输出,负极输出时,正极不输出,这样子也就形成了交流电,同样,三组都是这样工作的,它们的频率是8000HZ。讲到这,无刷电调也相当于一个工厂里电机上使用的变频器或者调速器。
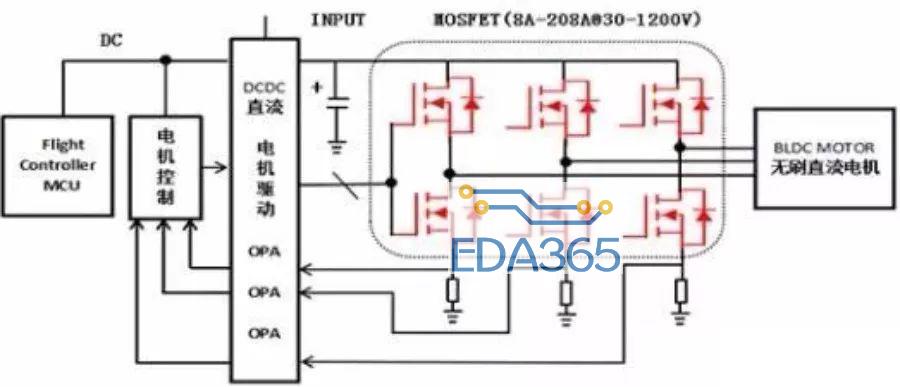
电调的输入是直流,通常由锂电池来供电。输出是三相交流,可以直接驱动电机。另外航模无刷电子调速器还有三根信号输入线,输入PWM信号,用于控制电机的转速。对于航模,尤其是四轴飞行器,由于其特殊性,需要专门的航模电调。

那么为什么在四轴飞行器上需要专门的电调呢,其有什么特别的地方?四轴飞行器有四个桨,两两相对呈十字交叉结构。在桨的转向上分正转和反转,这样可抵消单个桨叶旋转引起的自旋问题。每个桨的直径很小,四个桨转动时的离心力是分散的。不像直机的桨,只有一个能产生集中的离心力形成陀螺性质的惯性离心力,保持机身不容易很快的侧翻掉。所以通常用到的舵机控制信号更新频率很低。
四轴为了能够快速反应,以应对姿态变化引起的飘移,需要高反应速度的电调,常规PPM电调的更新速度只有50Hz左右,满足不了这种控制所需要的速度,且PPM电调MCU内置PID稳速控制,能对常规航模提供顺滑的转速变化特性,用在四轴上就不合适了,四轴需要的是快速反应的电机转速变化。用高速专用电调,IIC总线接口传送控制信号,可达到每秒几百上千次的电机转速变化,在四轴飞行时,姿态时刻能够保持稳定。即使受到外力突然冲击,依旧安然无恙。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 TRINAMIC - 用于BLDC电机的增量编码器
TRINAMIC - 用于BLDC电机的增量编码器








 APP下载
APP下载 登录
登录







