
如今,我们经常在很多公园或空旷场所看到有人玩那种小型无人机,每次看它们拿着手里的遥控器,让无人机自由翱翔于空中,这种感觉很“酷炫”,可是您知道无人机的工作原理吗?

无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域均有广泛应用。
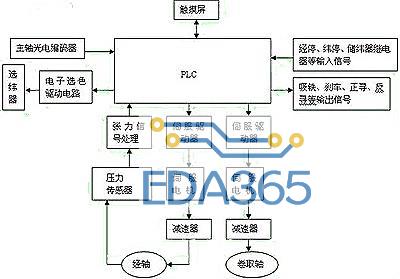
无人机由飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等组成。飞行管理与控制系统,相当于无人机系统的“心脏”部分,对无人机的稳定性、数据传输的可靠性、度、实时性等都有重要影响,对其飞行性能起决定性的作用。无人机机体的就是飞行器控制器——主控MCU。
MCU也叫单片机,是把中央处理器的频率与规格做适当缩减,并将内存(memory)、计数器(Timer)、USB、A/D转换、UART、PLC、DMA等周边接口,甚至LCD驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。无人机的主控MCU在无人机飞行系统中地位很重要。
无人机的工作原理
垂直运动,无人机利用旋翼实现前进和停止。力的相对性意味着旋翼推动空气时,空气也会反向推动旋翼。这是无人机能够上上下下的基本原理。进而,旋翼旋转地越快,升力就越大,反之亦然。
而要使无人机向右转,则需要降低旋翼1的角速度。但是,虽然来自旋翼1的推力缺失能使无人机改变运动方向,但与此同时向上的力不等于向下的重力,所以无人机会下降。
无人机是对称的。这同样适用于侧向运动。一架四轮无人机就像一辆每一面都可作为正面的车,所以了如何向前也就解释了如何向后或向两侧移动的问题。
无人机MCU的工作
无人机MCU是飞控子系统的,飞控系统是无人机完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的系统,飞控对于无人机相当于驾驶员对于有人机的作用,我们认为是无人机的技术之一。飞控一般包括传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。除了无人机MCU,无人机还需要陀螺仪、加速计、地磁感应、气压传感器,超声波传感器、光流传感器、GPS模块等想互协助工作方可完成飞行。
IMU感知飞行器在空中的姿态,将数据送给主控处理器MCU。主控处理器MCU将根据用户操作的指令,以及IMU数据,通过飞行算法控制飞行器的稳定运行。由于有大量的数据需要计算,而且需要实时性极高的控制,所以MCU的性能也决定了飞行器是否能够飞得足够稳定,灵活。
几家无人机MCU方案
高通 Snapdragon芯片:它有无线通信、传感器集成和空间定位等功能。采用了“RealSense”技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。
英特尔 凌动(Atom)处理器:内置了高达6个英特尔的“RealSense”3D摄像头,采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。
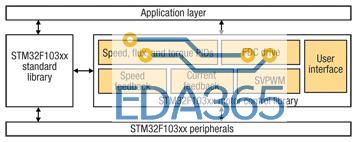
XMOS XCORE多核微控制器:频率高达500MHz 的32位RISC内核,带有Hardware Response I/O接口。多轴飞行器需要用到四至六颗无刷电机(马达),用来驱动无人机的旋翼。而马达驱动控制器就是用来控制无人机的速度与方向。原则上一颗马达需要配置一颗8位MCU来做控制,但也有一颗MCU控制多个BLDC马达的方案。
无人机MCU国产化任重道远
目前,国内从事无人机研发的企业接近五十家,但是其中做无人机MCU的微乎其微,这是因为MCU市场几乎是美国垄断,国内厂商想实现追赶或超越难度很大。近日有某家厂商投入重金研发无人机MCU,让国人振奋不已,但面临的挑战仍旧很多。随着国内厂商实力的壮大,未来我们或将看到属于自己的无人机MCU。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 选择合适的拓扑可提高工业AC/DC电源可靠性
选择合适的拓扑可提高工业AC/DC电源可靠性






 APP下载
APP下载 登录
登录







