APP下载
APP下载 登录
登录







摘要:文中对比了单极性和双极性PWM的技术特点,并叙述了现有的半桥驱动IC在应用中的局限性。利用一些简单的逻辑门,设计了一个单极性PWM逻辑分配电路,经过半桥驱动IC功率放大,驱动由IGBT组成的H桥功率转换电路,实现对雷达天线的伺服控制。上述方法构成的电路,解决了动态自举问题、提高了雷达天线转速及功率转换电路的效率。
关键词:单极性PWM;双极性PWM;半桥驱动IC;逻辑门;动态自举
随着大功率半导体技术的发展,全控型电力电子器件组成的脉冲宽度调制(PWM)技术在雷达天线控制系统中得到了广泛的应用。雷达天线控制系统一般采用脉冲宽度调制(PWM)技术实现电机调速,由功率晶体管组成的H桥功率转换电路常用于拖动伺服电机。根据在一个开关周期内,电枢两端所作用的电压极性的不同分为双极性和单极性模式PWM。
双极性PWM功率转换器中,同侧的上、下桥臂控制信号是相反的PWM信号;而不同侧之间上、下桥臂的控制信号相同。在PWM占空比为50%时,虽然电机不动,电枢两端的瞬时电压和瞬时电流都是交变的,交变电流的平均值为零,电动机产生高频的微振,能消除摩擦死区;低速时每个功率管的驱动脉宽仍较宽,有利于保证功率管的可靠导通。但是,在工作过程中,四个功率管都处于开关状态,开关损耗大,而且容易发生“直通臂”的情况;更严重的情况在于——电机电枢并非绝对的感性元件,在电机不动时,由于此时通过电枢上的交变电流,电枢的内部电阻会消耗能量,造成了不必要的损耗,降低了功率变换器的转换效率。
单极性PWM功率转换器中,一侧的上、下桥臂为正、负交替的脉冲波形,另外一侧的上桥臂关断而下桥臂恒通。在工作时一侧的上、下桥臂总有一个始终关断,一个始终导通,运行中无须频繁交替导通,因而减少了开关损耗;在PWM占空比为0%时,电机停止,H桥完全关断无电流通过,此时电机的内部电阻不消耗能量;由于单极性比双极性PWM功率变换器的电枢电路脉动量较少一半,故转速波动也将减小。但是,单极性和双极性PWM都存在可能的“直通臂”情况,应设置逻辑延时。
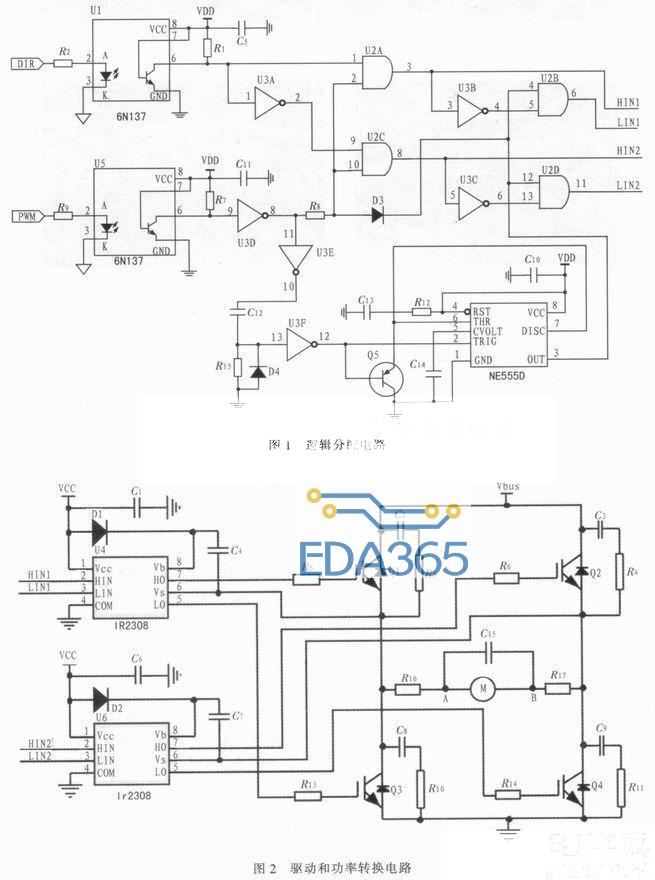
在进行H桥功率转换电路设计的时候。需要解决一个基本的问题一高端门悬浮驱动。通常有如下几种方式:第一,直接采用脉冲变压器进行隔离及悬浮;第二,采用独立的悬浮电源;第三,动态自举技术。前两种方法使用时大量使用分立元件,增加了调试难度、电路的可靠性变差、印制电路板的面积相应变大。而动态自举技术目前已被许多专用电路采用,此类产品集成度高、体积小巧、性能稳定、使用单一电源即可对栅极驱动。但是此类器件在使用时,必须外接自举二极管和自举电容,并连接合适的充放电回路,组成一个动态自举电路。这个动态自举的过程必须是循环往复的,才能保证H桥高端栅极的开通和关断。下面设计的单极性PWM电路将会解决上述问题。
1 H型单极性PWM的设计
1.1 脉冲分配电路的设计
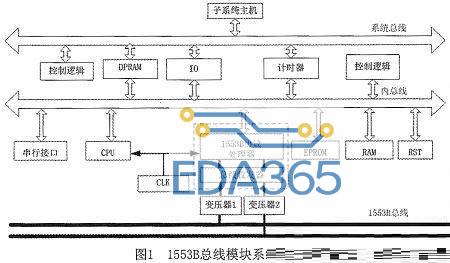
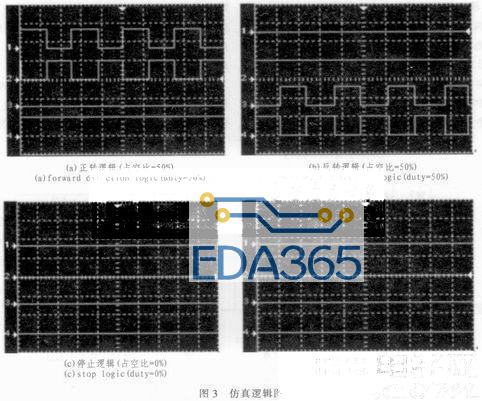
在这里,我们首先设计了一个单极性PWM脉冲分配电路,如图1所示。输入信号包括一个方向信号和一个脉冲宽度调制信号,这两个输入信号经过脉冲分配便产生单极性PWM脉冲。信号地和功率地通过高速光电耦合器隔离。调节脉冲宽度调制信号的占空比即可调节单极性PWM脉冲的占空比。这里的方向信号用来切换电动机转动的方向,这种做法区别于双极性PWM中的转动方向靠PWM的占空比来决定的做法。值得注意的是图1中的NE555电路,起到脉冲检测的作用。当脉冲宽度调制输入信号脉冲丢失时,此时输出低,将低端强制拉低,整个H桥关断。电路的仿真波形如图3所示。








 热门文章
热门文章