APP下载
APP下载 登录
登录







1 无人机应急电源的充电特性
无人机应急电源之所以要提前一天采用小电流充电是因为它的充放电是一个复杂的电化学变化过程,为了保证寿命,只能牺牲充电的速度。
1.1 多变量
影响充电过程的因素很多,如电解液浓度、极板活性物的活度、环境温度都可以对充电速度产生影响。这使得简单控制系统对提高充电效率无法起到显著作用。
1.2 非线性
无人机应急电源的最佳充电电压在整个充电过程中是时间的变指数函数,在不同阶段将呈现不同的变化规律。充电特性曲线如图1所示。
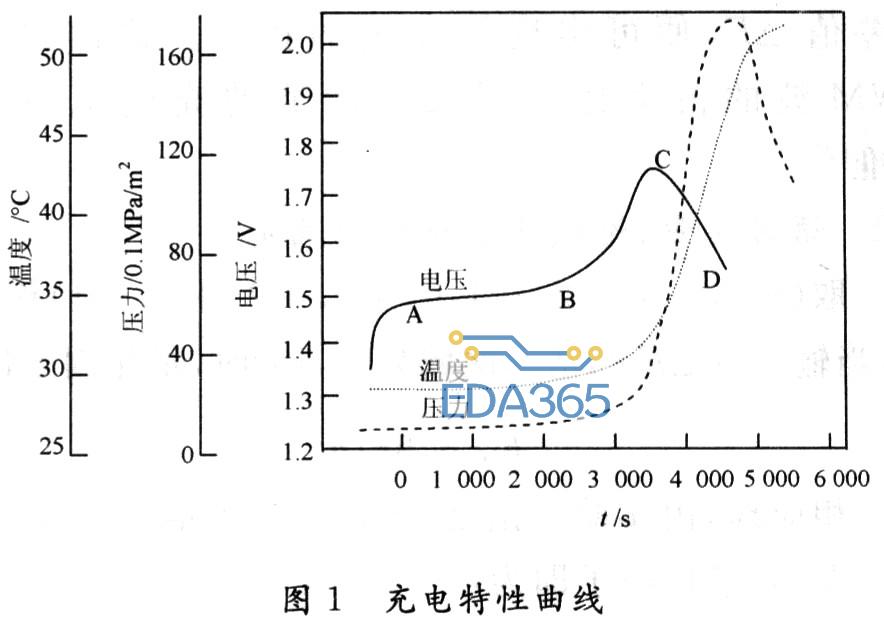
从图1中可以看出,无人机应急电源的充电过程可分为A-B段、B-C段、C-D段。其中A-B段是充电的初始阶段,电量基本用完,这一阶段可采用恒定小电流充电;B-C段是电压变化最为剧烈的一段,如果采用恒流充电,电流大,易损坏电池,电流小,不能充分发掘时间;C-D段的电压从最高点开始下降,可采用涓流充电。
1.3 独特性
无人机应急电源依据其具体不同的使用状况,其充电电流有很大的不同,即使同一套无人机系统同时配发相同容量、相同型号的电源也不例外。
装备现用的充电技术没有考虑充电过程的非线性变化,无法实现对无人机应急电源的适应性充电,只能以相对较小的电流实施充电,从而导致充电速度慢,而且充电后期析气严重,对电源内部造成损坏,不仅不能快速充电,还大大缩短了电源的使用寿命,必须加以改善。经综合比较,可选用成本较低,且适应性较强的模糊控制策略。
2 模糊控制充电器的设计
模糊控制不需要掌握被控对象的数学模型,特别适合这种非线性控制。它对过程参数的变化具有较强的适应性,并且可加入一些人为的经验因数,使控制过程更易于按照人的要求来实现。可以预期这种模糊控制充电器的工作原理是预先设计一张控制策略表存入单片机的ROM中。控制时根据采样结果计算输入量的值,然后通过量化因子将其模糊化,以得到其论域。再查表得到相应的控制量。将该控制量与比例因子相乘,即可作为输出量,对充电过程实施控制。
2.1 输入和输出量的确定
模糊控制器输入量的选择对系统性能的影响很大,电源温度、电源端电压以及充电电流都可作为输入量,但是这些方法的工程实现难度大且效果差。根据图1,B-C段是电压变化最为剧烈的一段,并且持续时间较长,可将这一段电压的变化率△U/△t作为模糊控制的输入量,再辅以电源实时电压与可充最高电压之间的差值△E,便可实现较完美的控制。输出量则以PWM波的占空比增量△ton调节的充电电流作为标准。
2.2 语言变量、论域及隶属度的确定
取(-4,-3,-2,-1,0,+1,+2,+3,+4)作为论域,当输入量AE的基本论域为[0,18]时,量化因子即为:
![]()
相应地,由实验得出△U/△t的最大值为5.236 0×10-4V/s,量化因子即为:
![]()
当输出量为充电电流时,其论域段的划分方法同上,用I表示输出控制量,则比例因子确定为:
![]()
对于论域(-4,-3,-2,-1,0,+1,+2,+3,+4),定义8个语言变量值:NB(负大),NM(负中),NS(负小),NO(零负),PO(零正),PS(正小),PM(正中)和PB(正大),采用正态函数模型μA(X)=e-(x-a/b)2构造隶属度函数,如图2所示。其中:参数a取适当的值使集合{-4,-3,-2,-1,0,+1,+2,+3,+4}映射到集合{NB,NM,NS,NO,PO,PS,PM,PB};参数6决定隶属函数的形状。可根据系统误差的调整得到合适的控制灵敏度和稳定性。在这里,当模糊化将精确值映射到相应模糊量的论域中时采用单点模糊法。









 热门文章
热门文章