APP下载
APP下载 登录
登录







1引言
随着高新技术的应用与发展,对控制系统性能的要求越来越高。在伺服系统控制器[1]的设计中,在系统参数变化以及外界扰动的干扰下的伺服控制系统的干扰抑制性能和鲁棒性能是非常重要的[2]。采用常规PID控制难以达到令人满意的控制效果。为了提高伺服控制系统的控制精度和鲁棒性,本文提出了基于干扰观测器的改进PID控制方法[3]。该方法能够很好地提高系统的跟踪精度,同时引入干扰观测器,可对系统的摩擦干扰进行很好地抑制,提高系统的鲁棒性。
2干扰观测器的设计原理
干扰观测器[4]的基本思想是,将外部力矩干扰及模型参数变化造成的实际对象与名义模型输出的差异等效到控制输入端,即观测出等效干扰。在控制中引入等效的补偿,实现对干扰完全控制。基本结构如图1所示: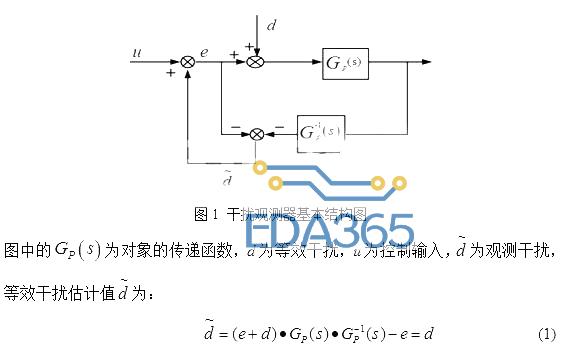
3干扰观测器的设计原理








 热门文章
热门文章