APP下载
APP下载 登录
登录







1 可控电动扳手控制器硬件设计
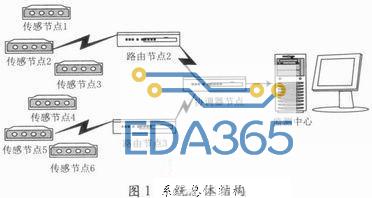
可控电动扳手控制器硬件电路框图如图1所示。

图1 可控电动扳手控制器硬件电路框图
1.1 数字电位器、按钮及显示控制电路
单片机选用STC12C5A60S2作为核心控制器。该机是单时钟/机器周期的单片机,是高速、低功耗、超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,工作电压范围为5.5 V~3.3 V;工作频率范围为0~35 MHz,相当于普通8051的0~420 MHz;1 280 B片内RAM数据存储器;四个16位定时器;可编程时钟输出功能;全双工异步串行口(UART),兼容普通8051的串口;先进的指令集结构,兼容普通8051指令集。电平转换芯片采用LM2575,输出5 V直流电压作为供电电源,电路图如图2所示。液晶显示采用LCM 128645ZK模块,使用五个按键分别用来控制步进电机正转、反转、扭矩设定、转角设定及清零,数字电位器用来设定扭矩值和转角值,电路如图3所示。

图2 电平转换电路








 热门文章
热门文章