APP下载
APP下载 登录
登录







摘要:介绍了采用灰度传感器的自循迹小车的设计与实现,并加以追踪与避障的功能。采用与白色地面反差很大的黑色路线引导小车按既定路线前进,若接近开关检测到物体时,实现追踪功能。通过改编程序,同样利用这两个接近开关可实现避障功能,即遇到障碍物时,自动转弯。
关键词:追踪;避障;循迹;灰度传感器
随着人们物质文化生活水平的不断提高,智能化的电子玩具深受人们的喜爱,尤其是各种智能小车,由于这类玩具具有较好的交互性,可控性,能够给人们带来很好的娱乐以及参与其中的体验,高科技智能化的电子类玩具逐渐成为市场的主流。与此同时,智能小车可以应用于考古、机器人、医疗器械等许多方面,尤其在足球机器人研究方面具有很好的发展前景。因此,智能化小车的研究不仅具有很大的现实意义,还具有极为广阔的应用前景和市场价值。
1 系统设计
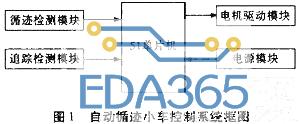
循迹小车左右车轮各用一个直流减速电机驱动,通过调制两个轮子的转速从而达到控制转向的目标,在车体前按照一定方式安装七个灰度传感器,将传感器所检测到的信号送到CPU,通过CPU控制电机所转方向,实现小车的循迹。在小车车体上左右安装两个红外传感器,当传感器检测到前面有物体时,即实现追踪功能,当左边一个传感器检测到时,即向左转,同理,右边一个检测到时,即向右转。若要让其实现避障功能,则需改变原始程序,若这两个红外传感器检测到障碍物时,即向右转(也可向左转)。自动循迹小车控制系统框图如图1所示。
2 灰度传感器排布与循迹实现
本系统使用的灰度传感器为ITR9909,根据实验测得其离地面大约1.5cm时,高低电平电压差最大,所以安装时,离跑道高度为1.5cm。
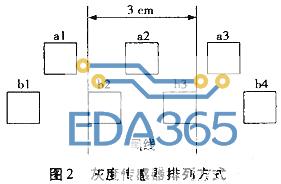
本系统灰度排布为两排,前排三个,后排四个。前排每一个与后相应两个占3 cm(循迹黑线的宽度),如图2,若a1,b2检测到黑线时,小车速度的80%向左微转,若a1,b1检测到黑线时,小车以原速度的50%向左转,只有b1检测到时,小车以原速度的30%向左转。若a2,b3检测到黑线时,小车以原速度的80%向右微转,a3,b4检测到时,则以原速度50%向右转,只有b4检测到时,则以原速度30%向右转。其它情况小车即直走。灰度传感器排列方式如图2所示。








 热门文章
热门文章